3ds Max�̳̣�����������ʽ�������ڄӮ�

�ڴ˽̳��У���ʹ�ÄӮ��S�c�� IK ����P�I�c���_�������ڵ�ƽ���ϡ�
�O���n�̣�
-
�����ӻ����� 3ds Max��
-
 �ڡ�����������ϣ��Γ���ϵ�y�����o��
�ڡ�����������ϣ��Γ���ϵ�y�����o��
����һ��������ﲢ���d FIG �ļ���
-
 �Γ���Biped�����o�ڡ�ǰ��ҕ�ڄ���һ��������
�Γ���Biped�����o�ڡ�ǰ��ҕ�ڄ���һ��������
-
 ���_���\�ӡ���塣
���_���\�ӡ���塣
-

 ���á��w��ģʽ�����Γ������d�ļ�����
���á��w��ģʽ�����Γ������d�ļ�����
���@ʾ�����_����Ԓ��
-
���_�ļ� cs4_tut_rtgame.fig��
���������ñ����� FIG �ļ��е��½Y��Ԫ�ء��@�N�������w����ÿֻ�_����һ�����_ֺ��ÿֻ������һ������ָ�����ǰ����ɶζ������ĶΡ�

-
 �P�]���w�Ρ�ģʽ��
�P�]���w�Ρ�ģʽ��
ע�⣺�����ڡ��w�Ρ�ģʽ�Є����Ӯ���
-
 �x�����еă������Γ�������ҕ�D����@ʾ�x������
�x�����еă������Γ�������ҕ�D����@ʾ�x������
-
����������� mywalk01.max��
�O���P�I�c��
-
����ҕ��ҕ�ڸ��Ğ龀����ʽ���Ŵ�D���Ա��_���܉�������Ҋ��
��ʾ��

 ���@ʾ�����У�ʹ�á�ҕҰ���͡�ƽ�ơ����Ŵ��_����
���@ʾ�����У�ʹ�á�ҕҰ���͡�ƽ�ơ����Ŵ��_����
-
�x�� Bip01 R Foot��

-
 �ڡ��\�ӡ�����ϵġ��P�I�c��Ϣ����չ���У��Γ����O���P�I�c����
�ڡ��\�ӡ�����ϵġ��P�I�c��Ϣ����չ���У��Γ����O���P�I�c����
�_�������@ʾ���ɫ������܉�E�ڵĎ� 0 ̎���Fһ���P�I�c���@�Ӿ��_ʼ��һ��������ʽ�Ӯ���

λ��܉�E�ڎ� 0 ̎���P�I�c��
�ڎ� 0 ̎�O�ò�ͬ��͵��P�I�c��
�� 3ds Max ���ЃɷN�����Á��O�ý�ɫ�ĄӮ��P�I�c������ʹ�ð������Ԅ��P�I�c���Ę˜��P�I��������׃�Q�����@�N��������Һ��Σ�������������ѽ������ˡ��Ԅ��P�I�c�������ܕ��o�����O�������P�I�c��
�ڶ��N����ʹ�á��P�I�c��Ϣ����չ���ϵġ��O���P�I�c�����o�����O���P�I�c�����oͬ�r�O�Îׂ������������µ��n���Ќ�ʹ���@�N������
-
 �ڡ�܉�E�x��չ�����x���|�ɴ�ֱ����
�ڡ�܉�E�x��չ�����x���|�ɴ�ֱ����
ԓ�����x������������ģ�Bip01����ͬ�r����Ƅӡ����ߡ��@�ӱ���_���O����һ���P�I�c�����Ǵ���һ�����}���_�����ܕ����^��ƽ�档Ո��Ҋ����Ďׂ����E��
-
�o������x�����I�Γ����ɼ����ҕ�ڡ�
-
�ڡ�܉�E�x��չ���У��x���|�ɴ�ֱ܉�E����Ȼ�����������Ƅӵ�����ҕ�ڡ�
�������㳯��ƽ�������Ƅӣ���ҕ��ҕ���еľW��������@һ�^�̣���
-
�� CTRL+Z ���N������
�O�ò�̤�P�I�c��
�F���O�ò�̤�P�I�c����̤�P�I�c���������飺����IK ��ϡ��O�Þ� 1�����á��B�ӵ���һ�� IK �P�I�c���������á�������g�����@�����O��һ���C�_���������^��ƽ�档
�P�ڡ�IK �P�I�c���ĸ�����Ϣ��Ո�������Ñ����еġ��P�I�c��Ϣ��չ�ڡ����}��
-
�ڡ�ҕ��ҕ���У���� Bip01 R Foot �]���x�У���ôՈ�x������
-
 �ڡ��P�I�c��Ϣ����չ���ϣ��Γ����O�ò�̤�P�I�c����
�ڡ��P�I�c��Ϣ����չ���ϣ��Γ����O�ò�̤�P�I�c����
�tɫ���S�c׃�ø����@����

-
 �ڡ�܉�E�x��չ���ϣ��Γ����|�ɴ�ֱ�������ڡ���ҕ���Ќ�������������Ƅӡ�
�ڡ�܉�E�x��չ���ϣ��Γ����|�ɴ�ֱ�������ڡ���ҕ���Ќ�������������Ƅӡ�
�_������λ�ڵ�ƽ���ϣ���ϥ�w�l���������m���������Ĵ�ֱ�Ƅӡ�

��̤�P�I�cͣ���ڵ����ϡ�
-
�� CTRL+Z ���N�����ƄӵIJ���ʹ�������ص�ԭʼλ�á�
�F�����˽����_����̤�P�I�c��Ч�����������_�����ֲ����S�c��ʹ����ͬ�ġ��O���P�I�c�����o����һ���У�ͨ�^�����S�c���� 0 ̎���P�I�c��Q���µ��P�I�c��
�O���S�P�I�c��
-
�ڎ� 0 ̎�����I�Γ���ҕ��ҕ�ڲ��x�� Bip01 R Foot��
-
 �ڡ��P�I�c��Ϣ����չ���ϣ��Γ����O�ò�̤�P�I�c����
�ڡ��P�I�c��Ϣ����չ���ϣ��Γ����O�ò�̤�P�I�c����
-
�ڡ��P�I�c��Ϣ����չ���ϣ����_ IK չ�_�ڲ��Γ����x���S����
�_���������S�c�F��׃���ҕ�����@ʾ���{ɫ�ͼtɫ���c���_��̎���S��tɫ�������@�Ǯ�ǰ����S�c��
����ģʽ�����������^����x���S�c��
-
���_�������w���x���S�c�����_ֺ�Ļ����ϡ�
�µ��S�c�@ʾ��tɫ��

ע�⣺����Ҫ��ÿ���x���S�c�r�O��һ���P�I�c��Ȼ�������ϣ�����ġ��P�I�c�����������ʹ�á��O���P�I�c�����o��
-
���r�g���K��ǰ�Ƅӵ��� 5 �������Γ����O���P�I�c����
-
���I�Γ��_��������Ԫ�ˆ����x�����D�����������ߙ��ϣ��_���ڡ��ֲ�����ϵ�����M���O�á�
-
���@���� Z �S���_�����D��s 15 �ȣ�ʹ�_���������Γ����O�ò�̤�P�I�c����
�_���ĵ�����̧���_�����w�����D�����_ֺ��Ȼͣ���ڵ����ϡ�

�F�ڮ��_�������w�x�_����r�������O���_ֺ���S�c�Ӯ���
�O���S�c�Ӯ���
-
���r�g���K��ǰ�Ƅӵ��� 10 �������Γ����O���P�I�c����
-
�Γ����x���S�����x���_ֺĩ�˵��S��

-
 �Γ����O�û����P�I�c���O���S�P�I����
�Γ����O�û����P�I�c���O���S�P�I����
-
�ٴΆΓ����x���S����������á�
-
�ڡ�ҕ��ҕ���У����I�Γ��_��������Ԫ�ˆ����x�����D����
-
���@ Z �S�����_���D��s 25 �ȣ�ʹ�_���^�m���������_ֺ�����ĝL�ӡ�

-
�Γ����O�û����P�I�c���O���_�����D�P�I����
�����P�I�c�����c��һ�P�I�c�ϲ���������IK ��͡��O�� 1��ʹ�_������λ�ڵ�ƽ���Ϸ�������O���˲�̤�P�I�c�����P�I�cԇ�D�c��һ�P�I�c�ϲ��r���_������������һ��ͬλ�á�
�F�ڮ��_�������w�x�_����r�������O���_ֺ���S�c�Ӯ���
���_�ĵ�����̧��
���_��ȫ�ĵ�����̧����O�������P�I�c��
-
���r�g���K������ 15 ����
-
�ڡ���ҕ���У����I�Γ��_��������Ԫ�ˆ����x���Ƅӡ������_���x���沢��ǰ�~�M��

ͨ�^�Ƅ��_������������������� IK ϵ�y��һ��ʾ�����Ƅ��_���r��������Ⱥ�С��朽ӄ������D��
-
 �ڡ��P�I�c��Ϣ����չ�ڣ��Γ����O�������P�I�c����̧����_λ�Ä����P�I����
�ڡ��P�I�c��Ϣ����չ�ڣ��Γ����O�������P�I�c����̧����_λ�Ä����P�I����
-
���r�g���K��ǰ������Ƅӣ��^�����еĄӮ���
-
����������� MyWalk02.max��
�i������һֻ�_��
-
���r�g���K�ƻ؎� 0 ̎���x�� Bip01 L Foot��
-
�ڡ��P�I�c��Ϣ����չ���У��Γ����O���P�I�c����
-
���_���x���S�������_�������w���xȡ�S�c��

�������S�c�����_
-
�Γ����O�ò�̤�P�I�c���鎬 0 ̎�����_�O�ó�ʼ�P�I�c��
�@���P�I�c�i���_�����Ժ�ݔ�뎬�еĺ��m�ƄӶ����i�������ץȡ���IJ����������Ƅӣ��ɗl�Ȍ��l������������������ƽ�����¡�
-
�Γ����x���S����������á�
���������P�I����
-
 �ڡ�܉�E�x��չ���ІΓ����|��ˮƽ����Bip01 ���Ԅ��x����
�ڡ�܉�E�x��չ���ІΓ����|��ˮƽ����Bip01 ���Ԅ��x����
-
�ڎ� 0 ̎���� Bip01 �Γ����O���P�I�c����
ԓ���������Ą���һ����ʼ�P�I�c��
-
���r�g���K������ 15 ����
-
�ڡ���ҕ���У�ʹ�á��Ƅӡ�׃�Q Gizmo �Ƅ����ģ����|�ɳ�ǰ�Ƅӣ�Ȼ���O������һ���P�I�c��

ע�⣺��������Ǹ����c�����ʹ�á��O���P�I�c��������Ҫʹ������������ IK �P�I�c��
-
ʹ�á��Ƅӡ�׃�Q Gizmo ���������������Ƅӣ�ʹ��ϥ�w�l���p������Ȼ���O������һ���P�I�c��
�����������Ƅӕr�����ȱ��ԄӰl��������

-
�x�� Bip01 L Foot��
-
�ڡ��P�I�c��Ϣ����չ���ϣ����_�������w�O��һ����̤�P�I�c��
-
���I�Γ����_������Ԫ�ˆ����x�����D�������D�_��ʹ�_���ĵ���̧��Ȼ���O������һ����̤�P�I�c��
�_���x�_�������D��

-
���r�g���K�Ƅӵ��� 22 �������Γ����O���P�I�c����
-
�ڡ�ҕ��ҕ���ІΓ����I�����á��x���S����Ȼ���� Bip01 L Foot ���_ֺĩ���xȡ�S��
-
�ڡ��P�I�c��Ϣ����չ���ϣ��Γ����O�û����P�I�c����Ȼ���P�]���x���S����
-
�ڡ���ҕ���У������_�����������D���O������һ�������P�I�c��

-
�ڡ�܉�E�x��չ���ІΓ����|��ˮƽ�����ٴΌ�����ǰ�ƣ�Ȼ���O��һ���P�I�c��

�������_���c������|���P�I����
-
�ڵ� 22 ��̎���x�� Bip01 R Foot ������ǰ�ƣ�Ȼ���O��һ�������P�I�c��

-
���á��x���S�����xȡλ�� Gizmo �M�����ϵ��_���c��Ȼ���O��һ�������P�I�c��
-
���á��x���S�������D�_ʹ���c����ƽ�У�Ȼ���O��һ�������P�I�c��

-
���_���x���S����Ȼ���O���_��̎���S���O������һ�������P�I�c��

�S�c�Ƅӵ��_��
-
����x���S�������r�g���K������ 27 ����
-
�ڡ���ҕ���У������_����ǰ�ơ�
���Կ����_��ҕ�����x�_�S�c��

�����P�I�cʹ�_�h�x�S�c
-
�O��һ�������P�I�c��
ҕ���е��S�c�����_��̎��
-
�����_�����Ƅ�ʹ����|���棬���O����һ�������P�I�c��

-
���á��x���S���������_�����w���xȡ�S��

�S�Ƅӵ����_�����w�ϡ�
-
 �Γ����|��ˮƽ�����Ƅ�����ʹ��λ�����_��֮�ϲ��O��һ���P�I�c��
�Γ����|��ˮƽ�����Ƅ�����ʹ��λ�����_��֮�ϲ��O��һ���P�I�c��

-
�ڵ� 27 ��̎���x�� Bip01 L Foot ���O��һ�������P�I�c��
-
�Ƅӕr�g���K���^���_���S�c�ĄӮ���
-
����������� MyWalk03.max��
�^�m�������ڣ�
-
�ڵ� 27 ��̎���Γ����|�ɴ�ֱ���Ա�����Ƅ����ġ�
-
���|���������Ƅӣ�ʹ���_�D������r��������������Ƅ�һ�c���������O��һ���P�I�c��
-
���r�g���K��ǰ�Ƅӵ��� 32 �����Ƅ�����ʹ��λ�����_�����w�Ϸ����������O��һ���P�I�c��

-
�ƄӲ����D Bip01 L Foot ʹ�_�����^���档�O��һ�������P�I�c��

�ڴ˾�����ʹ���@�����E���O����̤���P�I�c�i��һֻ�_���Ƅ����ģ�Ȼ���Ƅ���һֻ�_���O���P�I�c��
��ɲ������ڣ�
-
���r�g���K��ǰ�Ƅӵ��� 37 �������Γ����|��ˮƽ����������ǰ�ƣ�Ȼ���O��һ���P�I�c��

-
�x�� Bip01 L Foot �������Ƅ�ʹ�_�������������ǰ�����O��һ�������P�I�c��

-
���D���_ʹ�_�����¶��_ֺ���ϡ��O����һ�������P�I�c��
�_�F�ڿ�����Ч�����á�

-
�x�����_���Γ����x���S�����x���_��̎���S������S�O��һ����̤�P�I�c��
-
����x���S����
-
�Ƶ��� 39 �������D���_ʹ��ƽ���ڵ����ϡ�
-
�����_�O��һ����̤�P�I�c��
-
�Γ����|��ˮƽ���Ƅ�����ʹ�|��ǰ�ơ�
-
�������O��һ���P�I�c��
-
�ڵ� 41 ��̎�����D���_ֺʹ����ƽ���ڵ����ϡ��O��һ����̤�P�I�c��
-
�x�� Bip01 R Foot �����r�g���K�ƻص� 30 �����O��һ����̤�P�I�c��
-
�ڵ� 32 ��̎�����D���_ֺʹ����ƽ�ţ����O����һ����̤�P�I�c��
-
���r�g���K�Ƶ��� 37 ���������_���������D��Ȼ���O��һ����̤�P�I�c��
-
�Ƅӕr�g���K���鿴�\�ӡ�������Ҫ�����_ֺ�����D��
-
����������� MyWalk04.max��
�@ʾ܉�E��
������������Լ���܉�E�@ʾ������ʹ��܉�E�ڲ����������^�����ĵ��Ƅӡ�Ҳ������ҕ����ֱ�Ӿ�܉�E�ϵ��P�I�c��
-
�ڡ�܉�E�x��չ���ІΓ����|��ˮƽ����
-
 �ڡ��P�I�c��Ϣ����չ���У����_��܉�E����
�ڡ��P�I�c��Ϣ����չ���У����_��܉�E����
-
�Ƅӕr�g���K���^����������������܉�E���Ƅӡ�
-
 �������ߙ����x���x���Ƅӡ������á��ӌ���܉�E����Ȼ��Γ�܉�E�ϵ���һ�P�I�c��
�������ߙ����x���x���Ƅӡ������á��ӌ���܉�E����Ȼ��Γ�܉�E�ϵ���һ�P�I�c��

-
ʹ�á��Ƅӡ�׃�Q Gizmo ���P�I�c�Ƅӵ����_��܉�E�С�

�ڃ������܉�E�о��P�I�c��
-
�P�] Biped��܉�E����
���棺 ��Ҫ���������ʹ�� 3ds Max ��܉�E���� Ոʹ�á��@ʾ��չ�_�ڻ��P�I�c��Ϣ����չ���еġ�܉�E�����o��
�����ֱ۔[�ӣ�
��ɫ�������ѽ��������ߣ�����߀�ֲܴڡ������ֱ۔[�ӌ���Ӯ��������ӸС�
�ֱ۔[���c�Ȳ��\���෴��������ǰ�r�������ǰ���ֱ���ǰ�[�ӕr���ⲿ�l�����������[�ӕr��ֱ��
-
�Ƅӕr�g���K�Q�����ķ����ֱ۔[�ӡ�
�����ڵ� 27 ��̎�~����������@�������P�I����
-
 ���á��Ԅ��P�I�c����
���á��Ԅ��P�I�c����
-
�ڎ� 0 ̎���x���p�Ƅ����֣��O��һ���P�I�c��
-
�ڎ� 0 ̎���x���p�Ƅ����֣��O��һ���P�I�c��
-
�ڵ� 27 ��̎���x���Ƅ�����ʹ����ǰ�[�ӡ�
�{���ֱ۵�λ��ʹ�����ⲿ�l���p���������چ����ˡ��Ԅ��P�I�c�����Ƅ��ֱ۵ĕr����Ԅӄ����P�I����
-
 �ڡ�܉�E�x��չ���ϣ��Γ����෴����
�ڡ�܉�E�x��չ���ϣ��Γ����෴����
���ֱ��x�С�
-
���������������ƣ�ʹ�ֱ����L��
�����ǰ�������������ұ������ֱ��

-
�ڡ�ǰ��ҕ���У��p�� Bip01 R UpperArm��
���l�ұ۱��x�С�

-
 �ڡ��\�ӡ�����ϣ����_������/ճ�N����չ�ڲ��Γ��������ˑB����
�ڡ��\�ӡ�����ϣ����_������/ճ�N����չ�ڲ��Γ��������ˑB����
-
 �Γ����������ϡ�����ԓ���������� walkcycle1��
�Γ����������ϡ�����ԓ���������� walkcycle1��
-
�ڡ�ճ�N�x헡��M���Ϸ������á���ҕ�ڲ��@���ա���

-
�Γ��������˄ݡ����������Ƶ��ˑB�������� RArm back��
-
 �ڵ� 37 ��̎���Γ�������ճ�N�ˑB����
�ڵ� 37 ��̎���Γ�������ճ�N�ˑB����
��۔[���������
-
�ڵ� 27 ��̎���p�� Bip01 L UpperArm��
���l��۱��x�С�
-
�ڡ�����/ճ�N����չ���ϣ����ҕ��ҕ�ڣ�Ȼ���ٴΆΓ��������ˑB���������ˑB������ LArm forward��

-
�ڵ� 37 ��̎���Γ�������ճ�N�ˑB����
�ұ۔[���|�wǰ����
-
���á��Ԅ��P�I�c����
-
���r�g���K��ǰ������Ƅӣ��u���Ӯ�Ч����
-
����������� MyWalk05.max��
��粿���β����ӃAб��
�Ƅ�ͨ�^�Ƅ��ֺ��_�Լ����Ğ��ɫ�O���˄Ӯ������Ǽ��ǡ��β����^����Ȼ���oֹ���ӵġ������粿���β�����һЩ���D����ɲ������ڡ�
-
�x�� Bip01 Pelvis �����r�g���K�Ƅ����� 15 ����
���_�ڴˎ����ɲ�̤�P�I�c�i����
�����β����D�rҪС�ġ���Ҫ��С�ĸĄӌ��_�������Ĺ�����
���Ȳ���չ�����[�ӕr���β����Ƅӷ������p���D��
-
���@ Y �S���������D��s -2 �Ȳ��O��һ���P�I�c��
ע�⣺ֻ�܉�ʹ������@���������S���D��

�ġ�ǰ��ҕ�D�������β����D
���費�������^������D���O���P�I�c�r�������Լ��l���������m���i�����_����
-
���r�g���K�ƻ����� 0 �������@ Y �S������������D 2 �ȣ�Ȼ���O��һ���P�I�c�����@ X �S������D����s -3 �ȣ�Ȼ���O��һ���P�I�c��

-
���r�g���K������ 32 �������@ Y �S���D�����s 4 �ȣ�Ȼ���O��һ���P�I�c���� X �S�؏ʹ��^�̣�Ȼ���O��һ���P�I�c
-
�Ƅӵ��� 39 �����ٴ·��@ Y �S���������D -2 �ȣ�Ȼ���O��һ���P�I�c��
̎�����E������Ҳ����ͬ�ġ��ڵ� 27 ��̎���ֱ���һ�������ϔ[�����ڵ� 37 ��̎���������෴�����ϔ[�ӡ�
-
�x�������Y�nj���Bip01 Spine��
-
�ڵ� 27 ��̎�����ֱ۔[�ӵķ��������D���Dz��O���P�I�c�����@ X �S���D��s -6 �ȡ�

-
�ڵ� 37 ��̎�������LJ��@ X �S���D��s 12 �Ȳ��O���P�I�c��
���ǿ��ԇ��@�����S�������D��������ÿһ���S�����{�����ڸ������������У�ʹ���LJ��@ Z �S���D������ X �S�����ϵ����Dʹ�����ɳڡ�
�����O�ü��DŽӮ�֮�⣬Ҳ�����O���i�DŽӮ�ʹ�粿�����½���
Ť��朽�ģʽ��
�������B�ӡ���չ�ڰ��������O�ÄӮ��Ĺ��ߡ���������ʹ�á�����朽ӡ�Ҳ����ʹ�á�Ť��朽ӡ����O�Øӗl���ď�����/��Ť����
-
�x���w��ģʽ��
�ڡ��Y������չ���У�������朽ӡ����Ğ� 5���������Ը��� 10 ����朽ӣ����nj�ʹ�� 5 ��朽��^��Ч����
-
�P�]���w��ģʽ����
-
���á��Ԅ��P�I�c����
-
 �ڡ�����朽ӡ���չ���У����á�Ť��朽ӡ�ģʽ��
�ڡ�����朽ӡ���չ���У����á�Ť��朽ӡ�ģʽ��
-
�x�� Bip01 Spine �����@�ǃ����������͵ļ�����6. �D�����㎬�������@ X �S�����D����������һ���P�I�c�����@ Y �S������ͬ�IJ�����
-
�D�����㎬�������@ X �S�����D����������һ���P�I�c�����@ Y �S������ͬ�IJ�����
-
���r�g���K�Ƶ��� 27 ���������@ X �S���D�s 10 �ȣ��Ը����ֱ۵Ĕ[�����D�����{ɫ����ֻ�ֱ���ǰ�[�ӣ��Ա����D���M��ƥ�䡣
-
߀���ԇ��@ Y �S���D -1 �ȡ�Ոע�⣬��һ�����������D�ķ��Ⱥ�С���Y�����Ӵ���ɺܴ��Ӱ푡�
-
�ڵ� 37 �����෴�ķ����؏ʹ��^�̣��c����ľGɫ�ֱ۵Ĕ[����ƥ�䡣
-
����������� MyWalk06.max��
����ʹ��������ʽ�Ӯ��� IK �����O����һ�����εIJ������ڄӮ���
���ԅ���3ds Max��Ӿ�̳��еļ��g��������ɴ˄Ӯ��\�ӡ�������^����Ӿ�̳̣�Ո���^ȥ���̳���һ�龚����
����ʹ�ÄӮ������Eģʽ�Ԅӄ����������ڄӮ���Ҫ�W���@�N���g��Ո��Ҋ3ds Max������ɫ���ЄӮ���
(؟�ξ���admin)

 3D��ģܛ��Blender�����
3D��ģܛ��Blender�����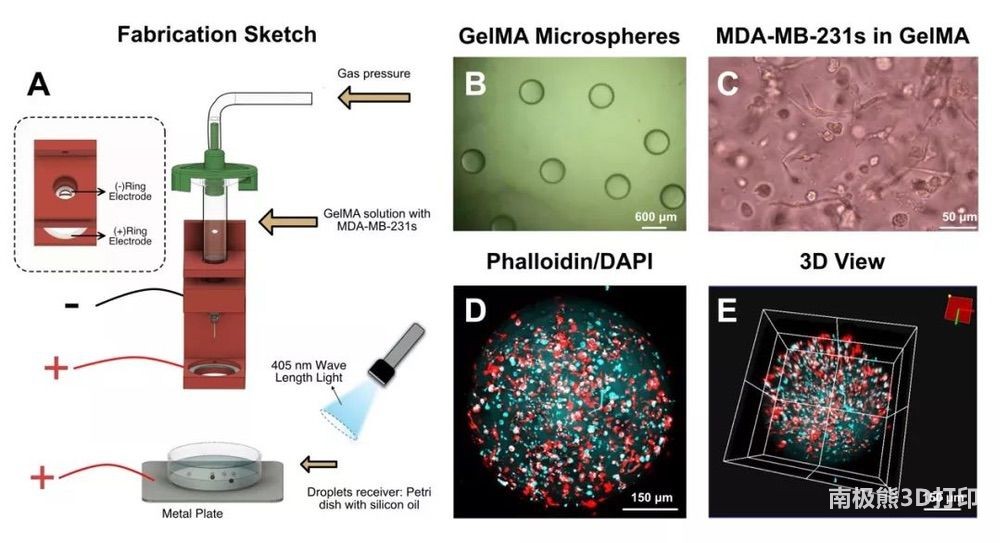 ����ϩ���������z��GelM
����ϩ���������z��GelM 픿��C����3D��ӡ�K�w����
픿��C����3D��ӡ�K�w���� ��ɫˮ�P+3D��ӡ�������
��ɫˮ�P+3D��ӡ������� �����3D��ӡ�C�������֣�
�����3D��ӡ�C�������֣� Magics�ָ�ģ�͵�3�N��ͬ
Magics�ָ�ģ�͵�3�N��ͬ- �� 3D��ģܛ��Blender�����������c��
- ������ϩ���������z��GelMA������3D��
- ��픿��C����3D��ӡ�K�w���ٲ�����1��
- ����ɫˮ�P+3D��ӡ�����������������T
- �������3D��ӡ�C�������֣��@���̳�Ո��
- ��Magics�ָ�ģ�͵�3�N��ͬ��ʽ����
- ��Magics�ָ�ģ�͵�3�N��ͬ��ʽ����
- ��3D��ӡ�C�̳̣����������P��
- ��3D��ӡ�C�̳̣�Ender-3 ����������ٔD
- ��3D��ӡ�̳̣��T�������� �������S
 Magics�ָ�ģ�͵�
Magics�ָ�ģ�͵� ���_�M��3D��ӡ��
���_�M��3D��ӡ�� 3D��ӡ�C���ֽ̳�
3D��ӡ�C���ֽ̳� �����n�ã�������
�����n�ã������� 3D��ӡ�̳̣�����
3D��ӡ�̳̣�����

