3ds Max�̳̣���(chu��ng)���c����ͬ������

�Ԅ����E�������_ʼ�c�������Ԅ������M�и��ģ���ʹ��׃�ê��ؼ����߱��F(xi��n)�����@�����������εķ����ܮa�����������^��Ȼ���\�ӣ�ԓ�\�ӿ��Կ��ٵ�(chu��ng)����
�O���n�̣�
-
���� 3ds Max��
-
�� tutorials\character_animation\footstep_animation �ļ��A�д��_ walk_start.max��
���@���ļ���һ���������վ����ԭ�c������

λ�ږŸ�ԭ�c�����ă������
-
���� ALT+W �����ҕ��ҕ�ڡ�
-
�Γ�����������ⲿλ�����x�С�
һ����ɫ�ķ�����@���x���|�w��λ�܇���
-
 ���_���\�ӡ���塣
���_���\�ӡ���塣
�͕��@ʾԓ�������Ŀ��ơ����w�͡�ģʽ̎���˼����B(t��i)��
���팢���á����E��ģʽ�����w�͡�ģʽ���Ԅӽ��á�
��(chu��ng)���������E��
-
 �ڡ�Biped����չ�ڵġ��\�ӡ�����У����á����Eģʽ����
�ڡ�Biped����չ�ڵġ��\�ӡ�����У����á����Eģʽ����
 �����E��ģʽ�İ��o��׃���Sɫ�����@ʾ�����E��(chu��ng)�����͡����E��������չ�ڡ�
�����E��ģʽ�İ��o��׃���Sɫ�����@ʾ�����E��(chu��ng)�����͡����E��������չ�ڡ�
-
 �ڡ����E��(chu��ng)������չ���У��Γ�����(chu��ng)���������E����
�ڡ����E��(chu��ng)������չ���У��Γ�����(chu��ng)���������E����
���@ʾ����(chu��ng)���������E:���ߡ���Ԓ�����@����Կ������ڄ�(chu��ng)���������E���S������(sh��)��ֻ��������E�Ĕ�(sh��)Ŀ����ʹ��������(sh��)���֞�Ĭ�J�O�á�
-
�ڡ���(chu��ng)���������E�����ߡ���Ԓ��ġ���Ҏ(gu��)���M�У��������E��(sh��)�����Ğ� 8��Ȼ��Γ����_������
���E��ҕ�����@ʾ���ɫ���@Щ�Ƿǻ�ӵ����E������߀�����Կ��ƃ��������κ΄Ӯ�������������ńӮ����x헣��t������ﲻ���Ƅӡ�

�ǻ�ӵ����E
-
 �ڡ����E��������չ���У��Γ�����ǻ�����E��(chu��ng)���P�I�c����
�ڡ����E��������չ���У��Γ�����ǻ�����E��(chu��ng)���P�I�c����
���������E���������(chu��ng)���˄Ӯ��P�I�c��
-
���ńӮ���
��������_ʼ���ߡ�

�����������һ����

�������������һ����

���������m(x��)�����ߡ�
-
�ڡ�Biped����չ���ϣ����á����Eģʽ�����o��
ע���һ�����E�ľ�̖�� 0�������һ�����E�ľ�̖�� 7��
-
 �ڡ�܉�E�x��չ���У��Γ����|��ˮƽ�����o���@�������� (COM) �����x��ˮƽλ��܉�E��
�ڡ�܉�E�x��չ���У��Γ����|��ˮƽ�����o���@�������� (COM) �����x��ˮƽλ��܉�E��
܉�E�ڌ��@ʾ�Ӯ��L�ȵ��P�I�c��

�|��ˮƽ�P�I�c
-
 �ڡ�܉�E�x��չ���У��Γ���ˮƽ�����o������ã�Ȼ��Γ����|�ɴ�ֱ�����o��
�ڡ�܉�E�x��չ���У��Γ���ˮƽ�����o������ã�Ȼ��Γ����|�ɴ�ֱ�����o��
�F(xi��n)�ھͿ���ԓҕ���п�����ͬ���P�I�c�ˡ�

�|�ɴ�ֱ�P�I�c
-
���ńӮ���
��������_ʼ���ߣ����Ǜ]��ʲô���c��
�����²��E�У����{�����|��ˮƽ���P�I�c�����|�ɴ�ֱ���P�I�c�͡����D��܉�E�Ԃ��Ի�ԓ�\�ӡ����U�����ĵ����D�Ԅ�(chu��ng)��һ��������������ߡ�
�{��(ji��)�|�����D�P�I�c��
-
 �ڡ�ҕ��ҕ���У�ʹ�á��������D�����Ƅ�ҕ�D��ʹԓ��������������M�����ߡ�Ȼ�r�g���K������ 0 ����
�ڡ�ҕ��ҕ���У�ʹ�á��������D�����Ƅ�ҕ�D��ʹԓ��������������M�����ߡ�Ȼ�r�g���K������ 0 ����

 �_�����x���˃�������ijһ��λ���ڡ�܉�E�x��չ���У��Γ����|�����D�����o��
�_�����x���˃�������ijһ��λ���ڡ�܉�E�x��չ���У��Γ����|�����D�����o��
�������D�@ʾ׃�Q Gizmo��܉�E���@ʾ�����D�P�I�c��

-
 �� 3ds Max ��B(t��i)���ϣ��Γ����P�I�cģʽ�����o�Ԇ��á��P�I�c��ģʽ��
�� 3ds Max ��B(t��i)���ϣ��Γ����P�I�cģʽ�����o�Ԇ��á��P�I�c��ģʽ��
���P�I�c��ģʽ�п���ʹ�á���һ�P�I�c���͡���һ�P�I�c�����o����x���Č������P�I��֮�g�M�����ӡ�Ҳ����ʹ���I�P�ϵ� < �� > �I���P�I��֮�g�M���Ƅӣ����o���c����ˡ�
-
���I�P�ϰ��� > �I���Ԍ��r�g���K������ 24 ����
-
ʹ��׃�Q Gizmo ���{��(ji��)�|�����D���� Gizmo ���Ƅӹ�ˣ����A׃���Sɫ�������ĵ� X ׃�ɼtɫ�r�����²��τ�������M�����D����������� X���Ŵ�ҕ�ڡ��@�� X �S���D 5 �� 10 �ȣ��Ԍ��β������Ӯ��е��Ȳ������Ƅӡ������D�ĕr��һֻ�_�����^��һֻ�_��
��ʾ��ԓ���D�@ʾ��׃�Q Gizmo �ϵ��Sɫ�ı��У�����Ҳ�@ʾ�ڠ�B(t��i)���ϵġ����ˡ��ֶ��С�����ʹ�ü�̖�I��+���͜p̖�I��-��������׃�Q Gizmo �Ĵ�С��

�������@�� X �S�����D
-
 �ڡ��\�ӡ�����ϣ����_���P�I�c��Ϣ����չ�ڲ��Γ����O���P�I�c�����o��
�ڡ��\�ӡ�����ϣ����_���P�I�c��Ϣ����չ�ڲ��Γ����O���P�I�c�����o��
���O���P�I�c�ĕr���������İl(f��)��ƫ�ơ���ҕ���У����Կ����{ɫ����ֻ�_���ٴ��^�Gɫ����ֻ��

���������_�c��һֻ�_�l(f��)���˷��x��
�l(f��)������r���_�ǡ�С�ȹǺʹ��ȹǶ������E Gizmos �����ơ����E��ʾ�� IK ����O�� 1 ��һ���P�I�c�����҆����ˡ��B�ӵ���һ�� IK �P�I�c�������O���P�I�c�ĕr���@Щ�O�þ���ʹ�_�ǡ�С�ȹǺʹ��ȹǻص����_������·����
-
 �Γ�����һ�P�I�c�������������� 40 ����
�Γ�����һ�P�I�c�������������� 40 ����
-
�@�� X �S��׃�Q Gizmo ���D -6 �� -10 �ȡ�

�{ɫ��ֻ�_�ķ������Dʹ�����|������
-
�؏��@���^�̣������O����������D�P�I�c�����{ɫ��ֻ�_���|��������P�I���ϣ��� 40��69��99 �������@ X �S�M�з������D��Ȼ���O���P�I�c���ھGɫ��ֻ�_��ص��P�I���ϣ��� 55��84��116 �������@ X �S�M���������D��Ȼ���O���P�I�c��

�ڵ� 54 ���ϵ��������D
-
�؏ʹ˷���ֱ����ɄӮ�ĩ�˵� COM �����D��ֹ����Ҫʹ�{��̫�^��������֮�g����׃��ʹ�\�ӿ�����������Ȼ��
����ɺ���ԓ�Ӯ�������ע��һ������ǰ�����D���Ķ��a�������ӵ��β��u�[��
-
 �ڡ�Biped����չ���ϣ��Γ��������ļ��������ļ������ mywalk.bip��
�ڡ�Biped����չ���ϣ��Γ��������ļ��������ļ������ mywalk.bip��
������������ mywalk.bip �ļ����뵽������Ƥ��ɫ�Ĉ����У�ԓ��ɫ�͕�����(j��)�������@���ļ��е�ָ����u�[�����β�������ԓ�Ӯ��Դ_���Ƿ���Ҫ�����M���{�������磬Dr.X�����Կ��ن��ӽ̳̣����p���_���@���ܾ���Ҫ�������Ƶø��_һЩ��ʹ������������ؽ�(j��ng)�^���ȡ�

�������ߵ� Dr.X
���������ӵ��_����
-
��ǰ�����E�^�m(x��)������d����� mywalk.bip��
���d BIP �ļ�����(chu��ng)�����x��������ڡ��\�ӡ�����ϣ��ڡ�Biped����չ���У��Γ������d�ļ��������_Ҫ���d���ļ����@���ļ��е������\����Ϣ�����ͽo�˃�����
-
�ڡ��x��܉�E����չ���У��Γ����|�ɴ�ֱ�����o��
�@�������Č����x��ֱλ��܉�E��
-
���á��P�I�cģʽ�����������δ���õ�Ԓ��
-
�ĵ� 0 ���_ʼ��ʹ�� < �� > �I�ڄӮ����M���Ƅӡ��ڵ��Gɫ���{ɫ���_���|���������һ���r���� COM �������ơ�
ϥ�w��������������_�����E�����ơ�
-
�ڡ��P�I�c��Ϣ����չ���У���ijһ�����M�и���֮���¡��O���P�I�c�����o��
�@������ҕ���������ĸ����O��һ���P�I�c����t�͕��G�����ġ�
-
���ńӮ���
����������½��ď����M�����ߡ�
-
 �ڡ�Biped����չ���ϣ��Γ��������ļ��������ļ������� mywalk2.bip��
�ڡ�Biped����չ���ϣ��Γ��������ļ��������ļ������� mywalk2.bip��
�����ֱۺ��ֲ��\�ӣ�
�ֱۺ��ֲ��\����һ�����w�\�ӵ����w���֡������������У������Ƅ��ֲ������D�ֱہ��Զ��x�ֱ۵��\�ӡ�
֮ǰʹ�á��O���P�I�c�����o��(chu��ng)�����P�I���������ڴ˼��g������֮��ʹ�á��Ԅ��P�I�c����
-
��ǰ�����E�^�m(x��)������d֮ǰ����� mywalk2.bip�����Ը�⣬���Դ��_ springystep.max������һ�����E��ĩβ̎�_ʼ��
-
 �� 3ds Max ��B(t��i)���У����á��Ԅ��P�I�c�����o��
�� 3ds Max ��B(t��i)���У����á��Ԅ��P�I�c�����o��
-
���r�g���K������ 0 ����
-
���r�g���K�����҂ȣ�ʹԓ�Ӯ��Ď��l(f��)�����D��ǰ���τӕr�g���K�����^���ֱۺ��Ȳ�����Δ[�ӵġ��м��о�ԓ�\�ӡ�
���Gɫ����ֻ�_��չ�r���{ɫ����ֻ�ֱ���ǰ�[�ӡ����{ɫ����ֻ�_����[�ӕr���Gɫ����ֻ�ֱ���ǰ�[�ӡ������Ƿ����ҵ�����ǰ������h����һ����
-
��ҕ���У��x�������Bip01 RHand���Gɫ����ֻ�֡�
܉�E�ڌ��@ʾ��ֻ�ֵ��P�I�c��
-
���r�g���K������ 30 ����
��܉�E������һ���ֲ������ϵ��P�I�c��
-
���I�Γ���ֻ�֣�������Ԫ�ˆ����x���Ƅӡ���
ʹ��׃�Q Gizmo���� Z �S�ό���ֻ�������ƄӴ�s 10 ��λ��
�����M���Ƅӵĕr���ѽ�(j��ng)���D�˃ɂ��ֱ۵Ĺ������ֲ��������ֱ۹��������چΪ���һ��܉�E�С�

�������Ƅ�
-
�x�� Bip01 R UpperArm ����Ȼ�����I�Γ����x�����D�������ϱ��@�� Z �S���D��s -30 �ȡ�

�ϱ��@�� Z �S���D
-
���ϱ��@�� Y �S���D��s 20 �ȣ�ʹ�ⲿͻ�����x�_�|�w��
-
�x��ǰ�ی��� (Bip01 R Forearm) ���M�����D��ʹ�ֿ����ز���

���D�ֲ�ʹ�������ز�
����ʹ�������\�ӌW������������D�������\�ӌW����朵�ĩ��ʹ��λ��׃�Q���ڱ���������λ�ã�����λ�ֱۡ�Ҳ�������D�ֲ���
-
ʹ�á��������D�������Dҕ�ڣ��@�ӾͿ��Կ���������������һֻ�ֱ۵ĽǶȡ�

�����������ֱ۵�ҕ�D
-
�x���{ɫ����ֻ�֣������I�Γ��x���Ƅӡ����Ƅ���ֻ��ʹ���Mһ���h�x���������|�w��Ȼ���� Z �S�������Ƅ��{ɫ����ֻ�֣�ʹ�ⲿ������
-
���r�g���K��ǰ������Ƅӣ��^�����еĄӮ���
-
�ڵ� 60 ���͵� 90 ���؏�ԓ�^�̡�
-
�ڵ� 45 ���͵� 75 ������һ���M���؏͡�
��ʾ�����Ҫ���_�ď����@Щ�ֱ۵�λ�ã�����ʹ�á�����/ճ�N����չ���еĹ��ߡ�ͬ�r�x��ɂ��ֱۼ��ϣ���(chu��ng)��һ�����ϣ�Ȼ�������_�Ď���ʹ�á������˄ݡ��͡�����ճ�N�����P��ʹ���@Щ���ܵ�Ԕ����Ϣ��Ո��Ҋ��(chu��ng)�����ε�������ʽ�\�ӡ�
-
���ńӮ���
��������� mywalk3.bip��
-
Ҫ�鿴��Ƥ��ɫ�ϵ������Ĺ������� \tutorials\character_animation\quick_start �̳��ļ��A�д��_ cs4_qs_DrX04.max��Ȼ����d mywalk3.bip �ļ������M�б��^��Ҳ���Լ��d distinctive_walk_final.bip��ӛסҪ�x���������ij����λ���L����Biped����չ�ڡ�

Dr. X �Ը��Џ��Ե��_������
�����^���\�ӣ�
���Ծ��^���\����ʹ�����������߿�����������Ȼ����ԓ���E�У��������^�����D�ԏ��{ COM ���D��
-
 ���á��Ԅ��P�I�c�����������δ���õ�Ԓ��
���á��Ԅ��P�I�c�����������δ���õ�Ԓ��
-
���á��P�I�c��ģʽ���������δ���õ�Ԓ��
-
���r�g���K������ 0 ����
-
 �ڡ�ҕ��ҕ���У�ʹ�� 3ds Max �����ߙ��ϵġ����D�����x��ԓ���������^����
�ڡ�ҕ��ҕ���У�ʹ�� 3ds Max �����ߙ��ϵġ����D�����x��ԓ���������^����
-
�������D�^����ʹ������������˯����һ�ӡ�

�^���������D
-
���I�P�ϰ��� > �I�Ԍ��r�g���K������һ�P�I����
-
�^�����P�I�����D���������D�^����ƽ��粿�ĽǶȡ�����Ҳ���Ԍ��^�����෴�ķ����M�����D��ʹ�����S COM �����D��ÿһ�N���D�����õ���ͬ�ĽY����������O�����D��ͬ�ӣ�Ҫע��H�����D���õ��F(xi��n)�е��P�I�c�ϡ�

���D�^����ʹ�����S�\�ӣ������D�^����ʹ���c�粿��������
-
�^�m(x��)���^�����P�I�c֮�g�M�����ӣ��O�����x�����D���O���^���ĄӮ���
��Ȼ���^���\�ӱ��^ƽ������˷���ԓ��һ���P�I�c����һ���P�I�c��u�İl(f��)��׃����
-
���á��Ԅ��P�I�c���͡��P�I�cģʽ����
-
����ԓ�Ӯ�����ע��һ���ж��ك��������^���\�����ӵ���ԓ�Ӯ��С�
���Ԍ���������� mywalk4.bip�����Ը���(j��) head_rotate_with.bip �� head rotate_against.bip ��ԓ�ļ��M�Йz�顣

�����^���\�ӵ� Dr.X �Ī�������
(؟�ξ���admin)

 3D��ģܛ��Blender�����
3D��ģܛ��Blender�����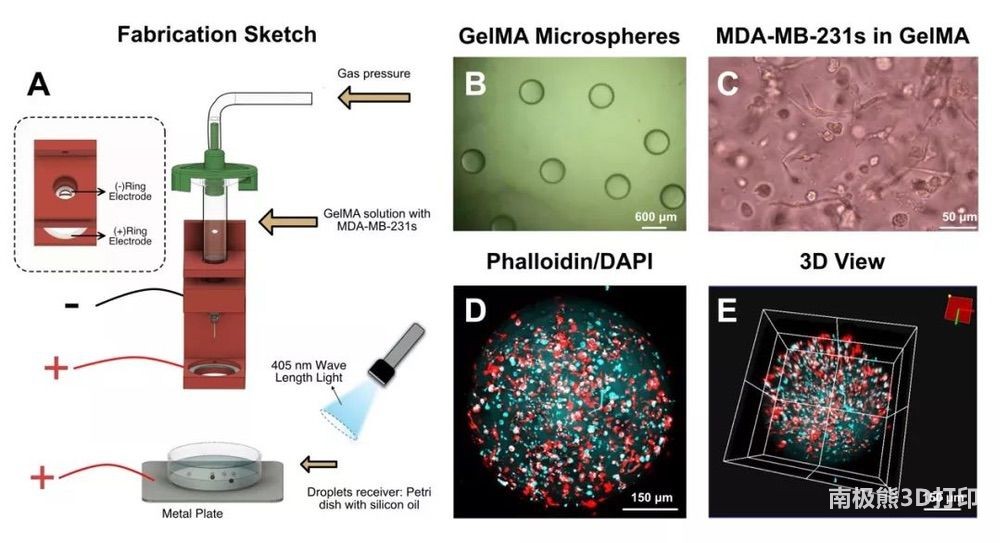 ����ϩ���������z��GelM
����ϩ���������z��GelM 픿��C����3D��ӡ�K�w����
픿��C����3D��ӡ�K�w���� ��ɫˮ�P+3D��ӡ�������
��ɫˮ�P+3D��ӡ������� �����3D��ӡ�C�������֣�
�����3D��ӡ�C�������֣� Magics�ָ�ģ�͵�3�N��ͬ
Magics�ָ�ģ�͵�3�N��ͬ- �� 3D��ģܛ��Blender�����������c��
- ������ϩ���������z��GelMA������3D��
- ��픿��C����3D��ӡ�K�w���ٲ�����1��
- ����ɫˮ�P+3D��ӡ�����������������T
- �������3D��ӡ�C�������֣��@���̳�Ո��
- ��Magics�ָ�ģ�͵�3�N��ͬ��ʽ����
- ��Magics�ָ�ģ�͵�3�N��ͬ��ʽ����
- ��3D��ӡ�C�̳̣����������P��
- ��3D��ӡ�C�̳̣�Ender-3 ����������ٔD
- ��3D��ӡ�̳̣��T�������� ��(chu��ng)�����S
 Magics�ָ�ģ�͵�
Magics�ָ�ģ�͵� ���_�M��3D��ӡ��
���_�M��3D��ӡ�� 3D��ӡ�C���ֽ̳�
3D��ӡ�C���ֽ̳� ��(chu��ng)���n�ã�������
��(chu��ng)���n�ã������� 3D��ӡ�̳̣�����
3D��ӡ�̳̣�����

