3ds Max�̳̣����� Physique
���ò��O�á�Physique����������ϵ��κ΄Ӯ������f���W���У��Ķ�ʹ���Ƅӣ��ͺ��������й����ͼ���һ�ӡ�
�O���n�̣�
-
�� tutorials\character_animation\quick_start �ļ��A���d cs4_qs_drX02.max��
ԓ�������� Dr. X ��һ��������˄��O�õă�����
-
�ڡ�ǰ��ҕ���У��Ŵ��ڃ������Ĺ��裨��ɫ����ɫ�������ģ������f COM�����{ɫ�����w����
���� Physique��
-
�x���ɫ�W�� DoctorX��
-
 �ڡ��ġ�����ϣ��ġ������б������x��Physique����
�ڡ��ġ�����ϣ��ġ������б������x��Physique����
��Physique����չ�ڌ����F����������ϡ�
-
 �ڡ�Physique����չ���У��Γ������ӵ����c����Ȼ��Γ�������� COM��
�ڡ�Physique����չ���У��Γ������ӵ����c����Ȼ��Γ�������� COM��
���@ʾ��Physique ��ʼ������Ԓ��
-
�Γ�����ʼ������
��ɫ�W��F���c����������P�����^�W��ij�ɫ׃�Θӗl�����������������Y�����c�W�����P��

��ɫ�ӗl������ Dr. X �W��ֲ�������ҕ�D�ڃ����������[�ص���r��ʹ�á������@ʾģʽ����
��ʾ��Ҫ��ҕ�D�ГQ���������@ʾģʽ��Ո�x�� DoctorX �W��Ȼ���� ALT-X��
�{�����ף�
Physique ͨ�^�W�����c����������c�W�����P��ÿ��������ﲿλ�����Q����ą^��h�@��λ�ڷ��׃Ȳ��ľW����c�܃�����ﲿλ��Ӱ푡�����Ĭ�J��Сȡ�Q�ڃ�����ﲿλ�Ĵ�С�����O�Ã��������˄ݕr���Ԍ����O�á�
ͨ������Ҫ�ք��{�����ף���ʹ�����������c�W��һ�����_�\�С����ע���Ҏ�t�ļ�̏ľW����¶�����t����һ���������cλ�ڷ���Ӱ푅^���ⲿ��ͨ�^���D�ֱۿ��Կ�����Ч����
-
 �ڡ�픡�ҕ�������I�Γ��Ԍ��伤�Ȼ��ʹ�á��^��s�š����鿴 Dr. X �����ֱۡ�
�ڡ�픡�ҕ�������I�Γ��Ԍ��伤�Ȼ��ʹ�á��^��s�š����鿴 Dr. X �����ֱۡ�

-
 �x�� DrX Biped L Forearm��Ȼ���������D����������һЩ��c�����S�ֱ��Ƅӡ�
�x�� DrX Biped L Forearm��Ȼ���������D����������һЩ��c�����S�ֱ��Ƅӡ�

���ܷ���Ӱ푵���c���W�����ߘӡ�
-
���� CTRL+Z ���ֱ۷Ż���ԭʼλ�ã��Ա�����{�����ס�
-
�ٴ��x�� DoctorX �W���������ї��ІΓ���Physique����߅�ļ�̖ (+) ��̖��Ȼ������@ʾ�����ס��ӌ���

ע�⣬���^�������ij�ɫ�ӗl����׃���Sɫ���@Щ��׃�Θӗl�����������ƄӘӗl���rʹ�W��׃�Ρ�
-
�x���^���������ǰ�۵�׃�Θӗl�������@ʾ�P�ķ��ס�

ע�⣬ÿ���������IJ�λ�Ѓɂ����ף�һ���ȷ��ף��tɫ����һ������ף���ɫ���������_�ڸ�����һЩ��cλ�������߅����ⲿ���@Щ��c�������܃�������±۵�Ӱ푣����ǷŴ���ס�
-
�ڡ���Ϸ��ס���չ�ڣ������ׅ������M�У���������s�š��������ӵ� 2.0��
λ�� Dr. X �����_��̎����c�F��λ�ڷ����С�

��ɫ�������ȫ�����±ۡ�
��ʹ���з����܉����_ƥ��W����Ҫ�M���S���С���{��������һ�n���У��������dһ���ļ������ļ����з����ѽ��^���_�{���ľW��
ע�⣺��ӛ��Ĭ�J�����ڃ����������Ĵ�С����ˣ�����{����ɫ�ķ��ף�ԓ��ɫʹ�á��˜ʡ���������w�ͣ��S����Ğ顰�Ǽܡ��w�ͣ��t����׃С�ܶ�����Ҫ�M�и��ྎ��
�������{���ꮅ���Ԍ����W��ƽ�����������õ��W�����ڡ�Physique������֮�ϣ���ʹ�W��׃�ø�ƽ����
-
�����W��ƽ�����������õ��W�����ڡ�Physique������֮�ϣ�Ȼ�������Δ����O�� 1��
������W��ƽ�����ڶї��з����ڡ�Physique�������棬�tֻ�茦�Ͷ�߅�ΰ汾��ģ���{�����ס�Physique ���O���ڶї������ς��f�����W��ƽ���������С�
-
����������� my_drx02.max��
(؟�ξ���admin)

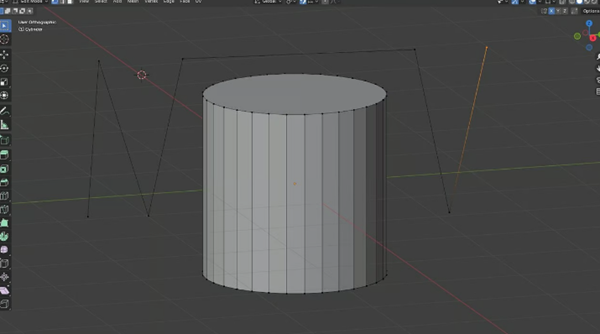 3D��ģܛ��Blender�����
3D��ģܛ��Blender�����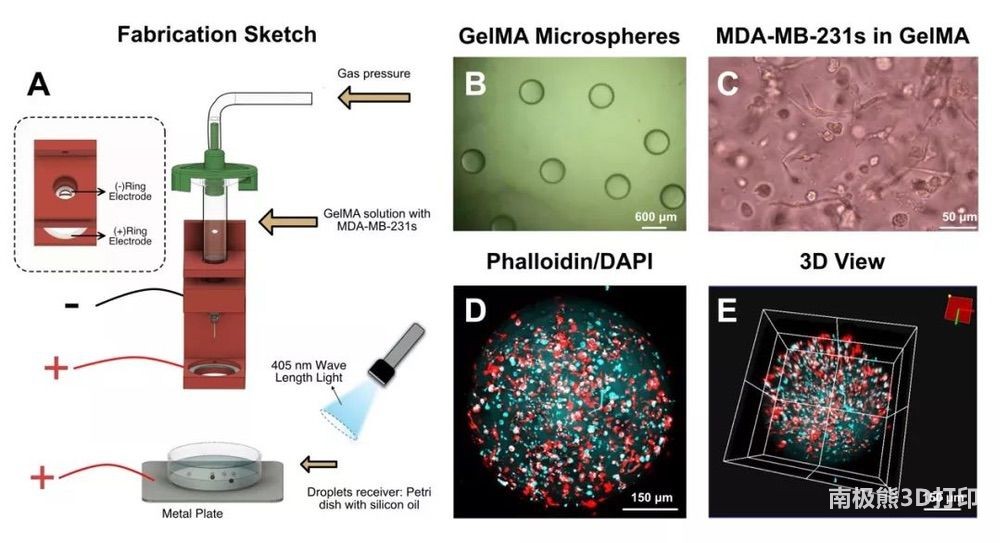 ����ϩ���������z��GelM
����ϩ���������z��GelM 픿��C����3D��ӡ�K�w����
픿��C����3D��ӡ�K�w���� ��ɫˮ�P+3D��ӡ�������
��ɫˮ�P+3D��ӡ������� �����3D��ӡ�C�������֣�
�����3D��ӡ�C�������֣� Magics�ָ�ģ�͵�3�N��ͬ
Magics�ָ�ģ�͵�3�N��ͬ- �� 3D��ģܛ��Blender�����������c��
- ������ϩ���������z��GelMA������3D��
- ��픿��C����3D��ӡ�K�w���ٲ�����1��
- ����ɫˮ�P+3D��ӡ�����������������T
- �������3D��ӡ�C�������֣��@���̳�Ո��
- ��Magics�ָ�ģ�͵�3�N��ͬ��ʽ����
- ��Magics�ָ�ģ�͵�3�N��ͬ��ʽ����
- ��3D��ӡ�C�̳̣����������P��
- ��3D��ӡ�C�̳̣�Ender-3 ����������ٔD
- ��3D��ӡ�̳̣��T�������� �������S
 Magics�ָ�ģ�͵�
Magics�ָ�ģ�͵� ���_�M��3D��ӡ��
���_�M��3D��ӡ�� 3D��ӡ�C���ֽ̳�
3D��ӡ�C���ֽ̳� �����n�ã�������
�����n�ã������� 3D��ӡ�̳̣�����
3D��ӡ�̳̣�����

