3ds Max�̳̣��üs���Ϳ������O��̫�ՑC�ĄӮ�

�ڱ��n���У����������΄յ�̫�ՑC�w�о��ʹ�ö�N�s���Ϳ�������
�O���n�̣�
-
���_ flyingspacefighter03.max��
ԓ�n���ļ��� tutorials\intro_to_animation �ļ��A�С�
�����ѽ��������Ѓ��ݣ�
-
������̫�ՑC FlightLeader��Wingman01 �� Wingman02 �M�ɵ��w�о�ꠡ�
-
̓�M���� SpaceshipControl��
-
�ɗl�\��·����flightpath����Ҋ���� wingmanpath���[�أ���
-
�zӰ�C���[�أ�SpaceCam��
-
ʹ��̓�M��������w�о��
���O�ÄӮ��r��̓�M�����Ǻ����õġ�ͨ�^�O��̓�M����ĄӮ������Ԍ�ע���÷dz����εČ����O���\�ӣ�����������ϵ�y���ٶȡ�һ�������̓�M����ĄӮ����Ϳ��Ԍ�����朽ӵ�̓�M�����ϡ��F�ڌ�̓�M�����Ƶ��ģ�������Ƶ��ġ�
��̫�ՑC朽ӵ�̓�M����
-
 ���픡�ҕ�ڣ��������δ��������������ߙ��ІΓ����x��朽ӡ����o��
���픡�ҕ�ڣ��������δ��������������ߙ��ІΓ����x��朽ӡ����o��
-
�x�� FlightLeader����������τӵ�̓�M���� SpaceshipControl �ϡ����_��˰��o��
FlightLeader �F����朽ӵ� SpaceshipControl���oՓ���� SpaceshipControl �Ƅӵ���̎��FlightLeader �����S֮�Ƅӡ�

-
�� Wingman01 �� Wingman02 ��朽ӵ� SpaceshipControl��
��̓�M��������·���s����
-
 �ڡ�픡�ҕ���У�ʹ�á�����@ʾ���鿴������
�ڡ�픡�ҕ���У�ʹ�á�����@ʾ���鿴������
-
�x�� SpaceshipControl��
-
�ġ��Ӯ����ˆ��У��x�s����>��·���s�������τӹ�˲��Γ� flightpath��
SpaceshipControl ������·�������c��̫�ՑC���S֮�Ƅӣ���������ѽ�朽ӵ�̓�M����

-
�ڡ�·����������չ���У��M�������O�á�
-
���á����S�������Aб���͡��㶨�ٶȡ���
-
�ڡ��S���M�У����á�Y���͡����D����
-
�����Aб�����O�Þ� 7.0������ƽ���ȡ��O�Þ� 1.0��
-
-
���SpaceCam��ҕ�ڲ����ńӮ���
��������̫�ՑC������ flightpath �Ƅӡ�
-
����������� MyFlight01.max��
ʹ�zӰ�C���S�\��
�ڱ������У���ʹ�á�朽Ӽs����ʹ�zӰ�C���w�о�����^�r���S����������һ�n�^�m������d flyingspacefighter04.max
��zӰ�C����朽Ӽs����
-
 ���_���@ʾ����壬�����á���e�[�ء���չ���еġ��zӰ�C����
���_���@ʾ����壬�����á���e�[�ء���չ���еġ��zӰ�C����
�zӰ�C SpaceCam �����F��
-
�ڡ�픡�ҕ���У�ʹ�á�����@ʾ���鿴�������x��zӰ�CĿ�ˡ�
ͬ�r�_�����r�g���K�O�Þ�� 0 �����㣩��

-
�����ˆ��У��x�Ӯ���>���s����>��朽Ӽs�������Γ� flightpath ���ڵ� 0 �����㣩�O�õ�һ��朽Ӆ�����

-
���r�g���K�Ƅӵ��� 80 �������Γ���朽Ӆ�������չ���еġ�����朽ӡ����o���Γ� SpaceshipControl��

-
�Γ�������朽ӡ�������á�
-
���SpaceCam��ҕ�ڲ����ńӮ���
�zӰ�CĿ�ˏĵ� 0 ������ 79 ��朽ӵ� flightpath���ڵ� 80 �����zӰ�CĿ���_ʼ���Tۙ SpaceshipControl ����
-
����������� MyFlight02.max��
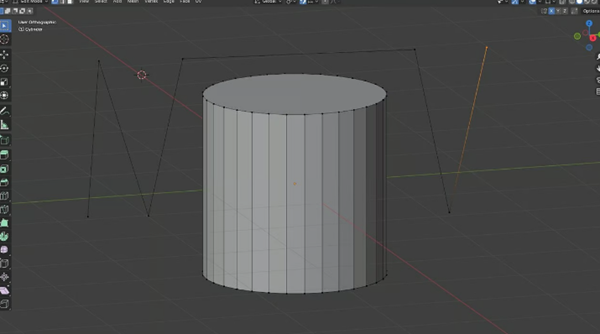
�w����L�^������
�����w�о����L�Ը�dz���đ�����w�о�ꠏ� SpaceCam �����ҕ�c���^�r���������X�Ñ�ԓ��һ�� V �͝L�D���ڱ������У���ʹ�á�����s���������w�о����L��̫�ՑC�ڱ���Ͱ�L�����D������һ�n�^�m������d flyingspacefighter05.max��
-
 �ڡ�픡�ҕ���У�ʹ�á��s�Ņ^�鿴����̫�ՑC��
�ڡ�픡�ҕ���У�ʹ�á��s�Ņ^�鿴����̫�ՑC��

-
 �ڡ�����������φΓ����o������Ȼ��Γ���̓�M������ FlightLeader ��߅����һ���µ�̓�M�������������� barrelroll��
�ڡ�����������φΓ����o������Ȼ��Γ���̓�M������ FlightLeader ��߅����һ���µ�̓�M�������������� barrelroll��

-
�Γ����x��朽ӡ����� barrelroll 朽ӵ� SpaceshipControl��
-
�ġ����ߡ��ˆ����x���R����Ȼ��Γ� SpaceshipControl��
�����R��ǰ�x��(SpaceshipControl)����Ԓ������F��

-
�ڡ����R����(�ֲ�)���M�У����á�X �S������Y �S���͡�Z �S���ؼ������Γ����_������
barrelroll ̓�M������c SpaceshipControl ���R��

-
 �ڡ��\�ӡ�����ϣ����_��ָ������������չ�ڣ������δ���_�������x�����D:Euler XYZ����������
�ڡ��\�ӡ�����ϣ����_��ָ������������չ�ڣ������δ���_�������x�����D:Euler XYZ����������
-
 �Γ���ָ�������������o�����ġ�ָ�����D����������Ԓ�����x��TCB ���D����
�Γ���ָ�������������o�����ġ�ָ�����D����������Ԓ�����x��TCB ���D����
ע�⣺�@���Ժ��׃�÷dz���Ҫ�����Բ�Ҫ©���@һ����
�O�� V �͝L�D�ĄӮ���
-
�ڡ�픡�ҕ�����x�� FlightLeader��
-
���_���Ӯ����ˆΣ����x�s����>������s������������Ƅӵ� barrelroll ̓�M�����ϲ��x������
�������� barrelroll �����ӵ����\�ӡ�����ϵġ�����s��Ŀ�ˡ��б��С�

-
�x�� barrelroll�����_���r�g���Kλ�ڵ� 0 �����㣩��
-

 ���á��O���P�I�c���ГQ�����Γ����O���P�I�c�����o��
���á��O���P�I�c���ГQ�����Γ����O���P�I�c�����o��
-
���r�g���K�Ƅӵ��� 110 �������ٴΆΓ����O���P�I�c����
���ѽ������˃ɂ��P�I�c��������ʹ FlightLeader �����؏ĵ� 0 ���w�е��� 110 ����

-
���� SpaceCam ҕ�ڣ������r�g���K�Ƅӵ��� 130 ����
-
 �Γ����x�����D������������������ϵ�����Ğ顰�ֲ�����
�Γ����x�����D������������������ϵ�����Ğ顰�ֲ�����

-
�Γ� barrelroll ̓�M�������@ Y �S���D��s 180 �ȣ�Ȼ��Γ����O���P�I�c�����o��
ע�⣺���ϣ�����_һЩ���t�����ڠ�B���ϵ� Y �Sݔ���ֶ���ݔ�����D�Ȕ���

-
���r�g���K�Ƅӵ��� 150 �������� barrelroll ̓�M�����@ Y �S���D��һ�� 180 �ȣ�Ȼ��Γ����O���P�I�c�����o����ɺ��á��O���P�I�c���ГQ��
-
����������� MyFlight03.max�������ńӮ���
�����韩���řC
�� FlightLeader �����ؼ��r��Wingman01 ����������һЩ�韩���������������������w�е��ǘ�ƽ�����ڱ������У���ʹ�á��벨���������� Wingman01 ���w�ЄӑB����һЩ����������һ�n�^�m������d flyingspacefighter06.max��
ע�⣺�������һ�n�^�m��Ո�_���r�g���K�ѷ��ص��� 0 �����㣩��
����������
-
�ڡ�픡�ҕ���У�ʹ�á��s�Ņ^�鿴����̫�ՑC�������δ����ԓ��������
�����ܱ����ʹ�á�����@ʾ������ʹ�á��s�Ņ^���鿴���ܑC��
-
�x�� Wingman01��
-
�ڡ��Ӯ����ˆ��ϣ��x��λ�ÿ�������>���벨����
����ԓ�������� Wingman01 �Ԅ����ӡ��б�������������λ���б�������ԭʼ�ġ�����λ�á����µġ��벨λ�á���������������Ĭ�J�����ء��O�Þ� 1.0��

-
���ńӮ�����ע�� Wingman01 �ğoҎ���w�С�
-
ֹͣ���ţ��������벨λ�á��������ġ����ء����Ğ� 25��
�F�� Wingman01 ̫�ՑC���w��·�����ܵ��p�p����Ӱ푡�
-
����������� MyFlight04.max��
�{�x�řC
�F�ڿ����� Wingman02 �����յ�һ�l��Ϣ�������ʂ�����x�_����w���e̎�����������L����朽Ӽs�������Ա� Wingman02 ���S FlightLeader �w��һС������Ȼ���w����һ�l·��������һ�n�^�m������d flyingspacefighter07.max��
�� Wingman02 ����·����
-
���r�g���K���Þ�� 0 �����㣩�����ڡ�픡�ҕ���пs�ŵ�����̫�ՑC��
-
�� Wingman02 ��߅����һ���µ�̓�M�������������� WingmanControl��

-
���I�Γ�����ҕ�ڣ�������Ԫ�ˆ����x�����Qȡ���[�ء����x�� wingmanpath ���Γ���ȡ���[�ء���
�� Wingman02 ǰ������Fһ�l�Sɫ��·����
-
�_���µ�̓�M���� WingmanControl ��̎���x����B��Ȼ��ġ��Ӯ����ˆ����x�s����>��·���s������������τӵ� wingmanpath �ϲ�ʰȡ����
WingmanControl ������ wingmanpath �����c��

-
�ڡ�·����������չ���Џ�����ǰ���O�á�
-
���á����S�������Aб���͡��㶨�ٶȡ���
-
�ڡ��S���M�У����á�Y���͡����D����
-
�����Aб�����O�Þ� 7.0������ƽ���ȡ��O�Þ� 1.0��
������ńӮ��������� WingmanControl �����Լ���·���ϡ�
-
ʹ Wingman02 ����·����
-
 �ڡ�픡�ҕ���У��x�� Wingman02�����Γ������_��ǰ�x��朽ӡ����o��
�ڡ�픡�ҕ���У��x�� Wingman02�����Γ������_��ǰ�x��朽ӡ����o��
Wingman02 ������朽ӵ� SpaceshipControl ̓�M�����ϡ�
-
�ġ��Ӯ����ˆ����x�s����>��朽Ӽs���������x�� SpaceshipControl��
Wingman02 ������ǰһ���w�У���朽Ӽs�������ṩ���`���ԣ����������S��ͬ��·����
-
���r�g���K�Ƅӵ��� 45 �������Γ����\�ӡ�����ϵġ�朽Ӆ�������չ���еġ�����朽ӡ����o��
-
�Γ� WingmanControl ̓�M����
�������� WingmanControl �����ӵ���Ŀ�ˡ��б��У����Ү� Wingman02 ���_�� 45 ���r��̫�ՑC�_ʼ���S WingmanControl ̓�M������һ�l·���ϡ�
-
����������� MyFlight05.max�������ńӮ���
ʹ Wingman02 �L�D����ꠣ�
��Ҫʹ Wingman02 �L�D����ꠣ������ٴ�ʹ�á�����s������
-
����r�g���K���ڵ� 0 ���������Ƅӻص� 0 �����㣩��
-
�ڡ�픡�ҕ���е� Wingman02 ��߅������һ��̓�M�������������� wingmanroll��

-
ʹ�á��x���Ƅӡ��� wingmanroll ������ Wingman02 ��߅��
�^�조ǰ���͡��ҡ�ҕ���Ԏ��������������@�����������ڈ������нM���ط��Ì���
-
�Γ����x��朽ӡ����� wingmanroll 朽ӵ� WingmanControl��
-
�ġ����ߡ��ˆ����x���R����Ȼ��Γ� WingmanControl��
�����R��ǰ�x��(WingmanControl)����Ԓ������F��

-
�ڡ����R����(�ֲ�)���M�У����á�X �S������Y �S���͡�Z �S���ؼ������Γ����_������
wingmanroll ̓�M������c WingmanControl ���R��
ע�⣺�@�Ǻ���Ҫ�ģ����Ҫ�_���Ժ��x�� wingmanroll �����Dֵ������ WingmanControl �ij�ʼ����t���x�� wingmanroll ���κ����Dֵ������̫�մ��ķ��Dʧȥ���ơ�

-
�ڡ��\�ӡ�����ϣ����_��ָ������������չ�ڣ������δ���_�������x�����D:Euler XYZ����������
-
�Γ���ָ�������������o�����ġ�ָ�����D����������Ԓ�����x��TCB ���D����
ע�⣺���δָ����TCB ���D�������������o��ʹ wingmanroll �@�ֲ��S���D��
-
�ڡ�픡�ҕ�����x�� Wingman02��
-
���_���Ӯ����ˆΣ����x�s����>������s������������Ƅӵ� wingmanroll �ϲ��x������
�������� wingmanroll �����ӵ����\�ӡ�����ϵġ�����s������չ���еġ�����s����Ŀ���б��С�

-
�ڡ�픡�ҕ�����x�� wingmanroll��
-
���á��O���P�I�c���ГQ�����Γ����O���P�I�c�����o��
-
���r�g���K�Ƅӵ��� 60 �������ٴΆΓ����O���P�I�c����
���ѽ������˃ɂ��P�I�c��������ʹ Wingman02 �����؏ĵ� 0 ���w�е��� 60 ����
-
���� SpaceCam ҕ�ڣ������r�g���K�Ƅӵ��� 85 ����
-
�Γ����x�����D������������������ϵ�����Ğ顰�ֲ�����
-
���@һ����Ҫ�����ɂ����D��
-
�� X �S�����@ʾݔ���ֶ���ݔ�� -15�����Γ����O���P�I�c�����o��

-
�� Y �S�����@ʾݔ���ֶ���ݔ�� 90�����Γ����O���P�I�c�����o��

-
-
���r�g���K�Ƅӵ��� 100 �����Ԉ�������ɂ����D��
-
�@ Z �S���D 5 �ȣ����Γ����O���P�I�c�����o��
-
�@ Y �S���D 90 �ȣ����ٴΆΓ����O���P�I�c�����o��
-
-
���r�g���K�Ƅӵ��� 115 �����Ԉ�������ɂ����D��
-
�@ Z �S���D 10 �ȣ����Γ����O���P�I�c�����o��
-
�@ Y �S���D 90 �ȣ����ٴΆΓ����O���P�I�c�����o��
-
-
��ɺ��á��O���P�I�c���ГQ������������� MyFlight06.max�������ńӮ���
(؟�ξ���admin)

 3D��ģܛ��Blender�����
3D��ģܛ��Blender�����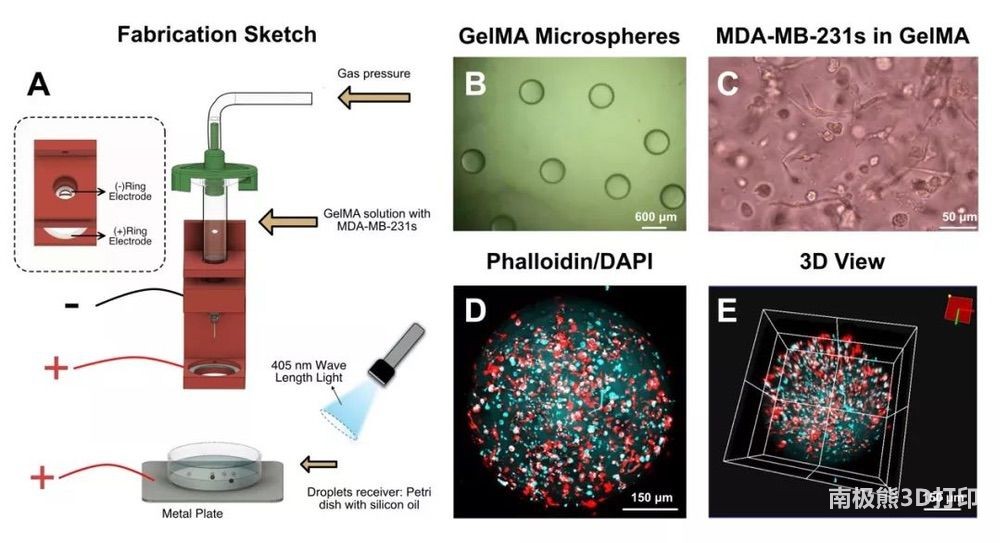 ����ϩ���������z��GelM
����ϩ���������z��GelM 픿��C����3D��ӡ�K�w����
픿��C����3D��ӡ�K�w���� ��ɫˮ�P+3D��ӡ�������
��ɫˮ�P+3D��ӡ������� �����3D��ӡ�C�������֣�
�����3D��ӡ�C�������֣� Magics�ָ�ģ�͵�3�N��ͬ
Magics�ָ�ģ�͵�3�N��ͬ- �� 3D��ģܛ��Blender�����������c��
- ������ϩ���������z��GelMA������3D��
- ��픿��C����3D��ӡ�K�w���ٲ�����1��
- ����ɫˮ�P+3D��ӡ�����������������T
- �������3D��ӡ�C�������֣��@���̳�Ո��
- ��Magics�ָ�ģ�͵�3�N��ͬ��ʽ����
- ��Magics�ָ�ģ�͵�3�N��ͬ��ʽ����
- ��3D��ӡ�C�̳̣����������P��
- ��3D��ӡ�C�̳̣�Ender-3 ����������ٔD
- ��3D��ӡ�̳̣��T�������� �������S
 Magics�ָ�ģ�͵�
Magics�ָ�ģ�͵� ���_�M��3D��ӡ��
���_�M��3D��ӡ�� 3D��ӡ�C���ֽ̳�
3D��ӡ�C���ֽ̳� �����n�ã�������
�����n�ã������� 3D��ӡ�̳̣�����
3D��ӡ�̳̣�����

