╬„░▓Į╗┤¾╠ŲŠ┤▀_(d©ó)┼c╚Aųą┐Ų┤¾Óćųt║Žū„: 3D┤“ėĪ╦«─²─zųŲū„Ą─┤┼ąį▄ø¾wÖC(j©®)Ų„╚╦
Ģr(sh©¬)ķgŻ║2021-10-29 22:01 üĒį┤Ż║─ŽśOą▄ ū„š▀Ż║admin ķåūxŻ║┤╬
┤┼ł÷“ī(q©▒)äėĄ─╬óą═▄ø¾wÖC(j©®)Ų„╚╦ę“Ųõ┐╔ŠÄ│╠ūāą╬║═▀h(yu©Żn)│╠▀b┐žĄ─┐ņ╦┘“ī(q©▒)äė╠žąįŻ¼į┌╔·╬’ßt(y©®)īW(xu©”)ŅI(l©½ng)ė“Š▀ėąÅVķ¤Ą─æ¬(y©®ng)ė├Ū░Š░ĪŻ2018─ĻŻ¼Ą┬ć°±RŲš╦∙Metin
Sitti║═┬ķ╩Ī└Ē╣żīW(xu©”)į║┌w▀x┘RłF(tu©ón)ĻĀ(du©¼)Ęųäe¬Ü(d©▓)┴ó╠ß│÷┴╦╗∙ė┌ė▓┤┼▄ø▓─┴ŽĄ─▄ø¾wÖC(j©®)Ų„╚╦Ż©Nature 554Ż¼Nature
558Ż®Ż¼ę²Ų┴╦ÅVĘ║ĻP(gu©Īn)ūóĪŻ╚╗Č°Ż¼ė▓┤┼▄ø▓─┴ŽĄ─蹊┐╔ą╠Äė┌│§▓ĮļAČ╬Ż¼╚į┤µį┌ųTČÓ╠¶æ(zh©żn)Ż║┤┼«ĀŠÄ▌ŗ└¦ļyŻ¼š{(di©żo)┐ž╩ųČ╬▌^╔┘Ż╗┴”īW(xu©”)ĮY(ji©”)śŗ(g©░u)╩¦ų«║åå╬Ż¼Ž▐ųŲ┴╦Ųõūāą╬─▄┴”ĪŻ
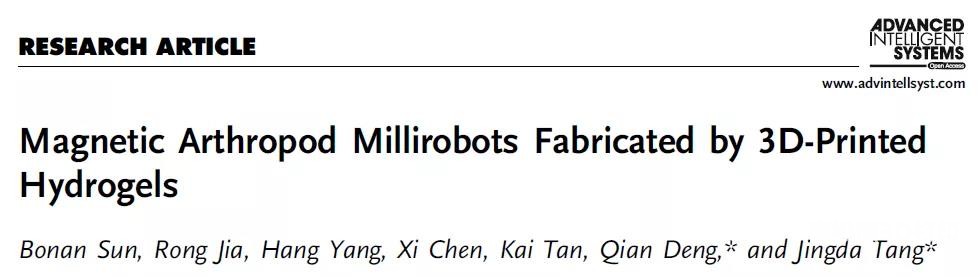
Į³╚šŻ¼╬„░▓Į╗═©┤¾īW(xu©”)╠ŲŠ┤▀_(d©ó)Ė▒Į╠╩┌║═╚Aųą┐Ų╝╝┤¾īW(xu©”)ÓćųtĖ▒Į╠╩┌蹊┐łF(tu©ón)ĻĀ(du©¼)į┌WileyŲņŽ┬ųŪ─▄ŽĄĮy(t©»ng)ŅI(l©½ng)ė“Ų┌┐»Advanced Intelligent Systems░l(f©Ī)▒ĒŅ}×ķĪ░Magnetic Arthropod Millirobots Fabricated by 3D-Printed HydrogelsĪ▒ Ą─╬─š┬ĪŻū„š▀īó3D┤“ėĪ┼cĪ░─Ż░Õ▌oų·┤┼╗»Ī▒ŽÓĮY(ji©”)║ŽŻ¼į┌▒Ż┴¶Å═(f©┤)ļsĮY(ji©”)śŗ(g©░u)Ą─═¼Ģr(sh©¬)Ż¼┐╦Ę■┴╦įŁ╬╗┤┼«ĀŠÄ▌ŗĄ─└¦ļyĪŻ▀M(j©¼n)ę╗▓Į×ķ┤┼ąį▄øÖC(j©®)Ų„įO(sh©©)ėŗ(j©¼)┴╦ŅÉ╦Ų╣Ø(ji©”)ų½äė╬’Ī░ĻP(gu©Īn)╣Ø(ji©”)Ī▒Ą─ĮY(ji©”)śŗ(g©░u)Ż¼īŹ(sh©¬)¼F(xi©żn)┴╦Ī░ĻP(gu©Īn)╣Ø(ji©”)Ī▒▓┐╬╗ĘŪŠ∙ä“ÅØŪ·äéČ╚Ą─š{(di©żo)┐žŻ¼╩╣Ųõ┐╔ęįį┌▌^ąĪ┤┼ł÷Ą─“ī(q©▒)äėŽ┬▀_(d©ó)ĄĮĖ³╝čĄ─ūāą╬ą¦╣¹Ż¼ęį┤╦įO(sh©©)ėŗ(j©¼)┴╦▒ŖČÓūāą╬ĮY(ji©”)śŗ(g©░u)ĪŻū„š▀š╣╩Š┴╦į┌ė░Ž±╩ųČ╬▌oų·Ž┬Ż¼└¹ė├┤┼ł÷▀b┐ž╦«─²─zÖC(j©®)Ų„╚╦Å─žiĄ─▓╗═¼Ų„╣┘ųąČ©╬╗Īóūź╚Ī║═ęŲäė═ŌüĒ«É╬’Ż¼ĻU├„┴╦┤┼ąį▄øÖC(j©®)Ų„ū„×ķ╬óą═╩ųąg(sh©┤)ÖC(j©®)Ų„╚╦Ą─æ¬(y©®ng)ė├Ū░Š░ĪŻ
1 ┤┼ąįūāą╬ĮY(ji©”)śŗ(g©░u)Ą─įO(sh©©)ėŗ(j©¼)Īó▓─┴Ž║Ž│╔
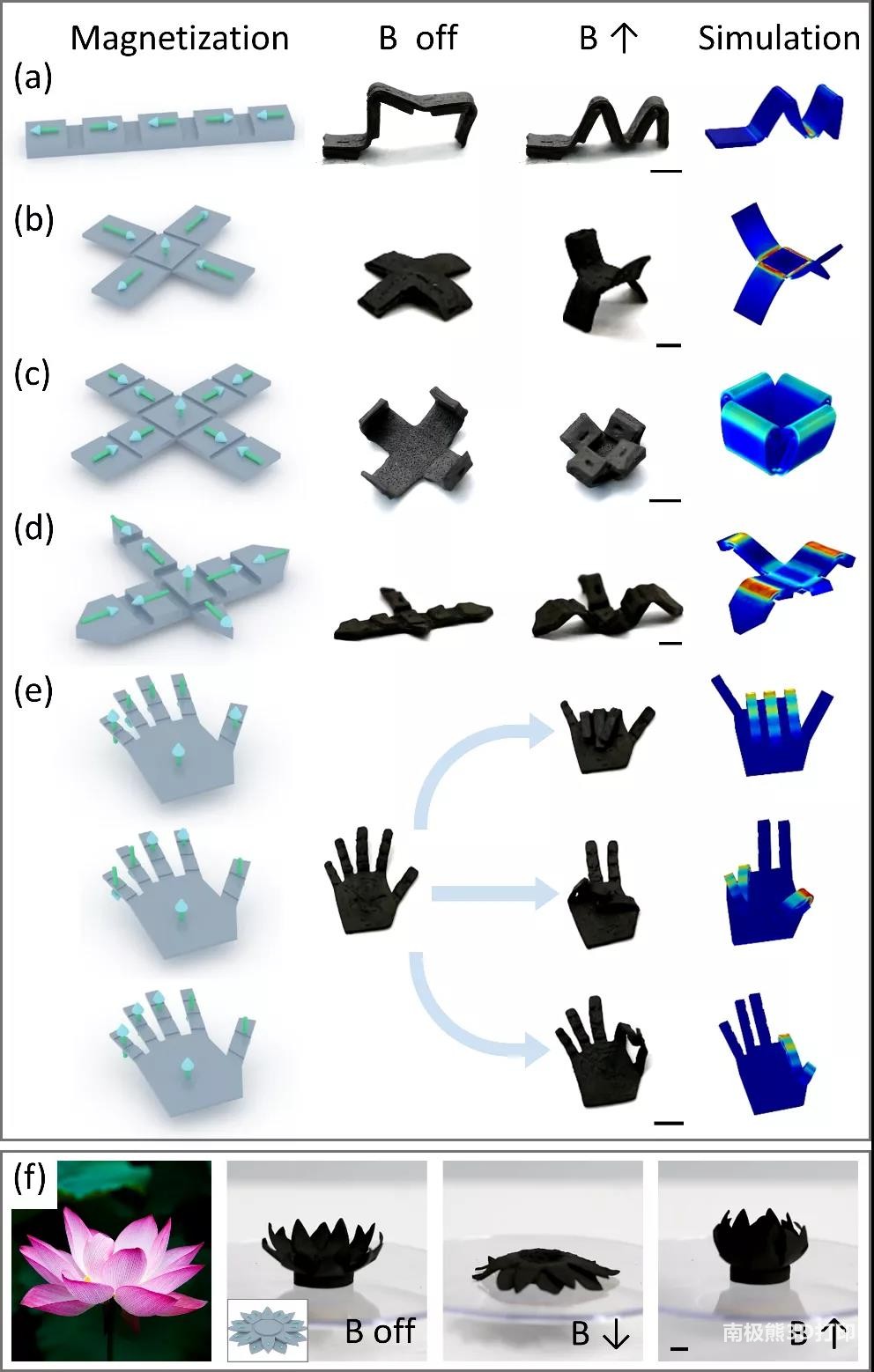
ū„š▀═©▀^ōĮļsė▓┤┼ąįŅw┴ŻŻ©NdFeBŻ®Ą─3D┤“ėĪ┤┼ąį╦«─²─zųŲįņ┤┼ąį▄ø¾wÖC(j©®)Ų„╚╦Ż¼ė▓┤┼Ņw┴Ż┐╔▀M(j©¼n)ąą┤┼«ĀŠÄ▌ŗŻ¼╩╣▓─┴Žį┌═Ō╝ė┤┼ł÷Ž┬«a(ch©Żn)╔·┐╔ŠÄ│╠Å═(f©┤)ļsūāą╬ĪŻĘ┬╔·Ī░ĻP(gu©Īn)╣Ø(ji©”)Ī▒įO(sh©©)ėŗ(j©¼)īó▄øÖC(j©®)Ų„ųą│ŻęŖĄ─ÅØŪ·ūāą╬Ż©▓─┴Žš¹¾w░l(f©Ī)╔·ūāą╬Ż®▐D(zhu©Żn)╗»×ķš█»Būāą╬Ż©ų„¾wć·└@ĻP(gu©Īn)╣Ø(ji©”)▐D(zhu©Żn)äėŻ®Ż¼╩╣ŽÓ═¼┤┼ł÷Ž┬Ą─ūāą╬ĮŪČ╚į÷┤¾Ż¼═¼Ģr(sh©¬)ĮĄĄ═┴╦─▄┴┐Ž¹║─Ż©łD1Ż®ĪŻ
▓─┴Ž║Ž│╔įöęŖJ. Mater. Chem. B, 2021, DOI: 10.1039/D1TB01694FŻ©https://pubs.rsc.org/en/content/articlelanding/2021/TB/D1TB01694FŻ®ĪŻįōė▓┤┼ąį╦«─²─z╠Ē╝ė┴╦╦«─²─z╬óŪ“Ż¼═¼Ģr(sh©¬)ŲĄĮļpŠW(w©Żng)Įj(lu©░)į÷ĒgĪóį÷│Ē║═3D┤“ėĪĄ─ą¦╣¹Ż¼┤_▒Ż┴╦ė▓┤┼Ņw┴Żį┌╦«─²─z╗∙¾wųąĄ─Š∙ä“Ęų▓╝╝░┤┼«ĀŠÄ▌ŗŻ©łD2Ż®ĪŻ
ū„š▀蹊┐┴╦┤┼ąį▄øÖC(j©®)Ų„Ą─╗∙▒Š┴”īW(xu©”)ĮY(ji©”)śŗ(g©░u)Ż©æę▒█┴║Ż®į┌┤┼ł÷Ž┬Ą─ūāą╬ąą×ķŻ©łD3Ż®Ż¼▓ó═©▀^īŹ(sh©¬)“×(y©żn)║═öĄ(sh©┤)ųĄĘ┬šµī”▒╚┴╦ÅØŪ·║═š█»Bā╔ĘNūāą╬─Ż╩ĮŻ¼░l(f©Ī)¼F(xi©żn)═¼śė┤┼ł÷Ž┬Ż¼š█»B─Ż╩ĮĄ─ūāą╬ĮŪČ╚Ė³┤¾Ż¼ūC├„┴╦ĻP(gu©Īn)╣Ø(ji©”)įO(sh©©)ėŗ(j©¼)Ą─ėąą¦ąįŻ¼╠ĮŠ┐┴╦š█║█Äū║╬ģóöĄ(sh©┤)Ą─ė░ĒæŻ¼×ķ┤╦║¾Ą─ÖC(j©®)Ų„╚╦ĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ(j©¼)╠ß╣®┴╦└Ēšōę└ō■(j©┤)ĪŻ
2 ┤┼ąį▄ø¾wÖC(j©®)Ų„╚╦Ą─“ī(q©▒)äėūāą╬║═æ¬(y©®ng)ė├š╣╩Š
ū„š▀īŹ(sh©¬)¼F(xi©żn)┴╦ČÓĘN┤┼ąįūāą╬ĮY(ji©”)śŗ(g©░u)į┌┤┼ł÷“ī(q©▒)äėŽ┬Ą─┐ņ╦┘Īó┐╔ųžÅ═(f©┤)ūāą╬“ī(q©▒)äėŻ©łD4Ż®Ż¼▓óŪęė├ėąŽ▐į¬Ę┬šµ▄ø╝■ŅA(y©┤)£y┴╦▄øÖC(j©®)Ų„Ą─ūāą╬ĪŻ▀M(j©¼n)ę╗▓ĮįO(sh©©)ėŗ(j©¼)ųŲįņ┴╦ę╗ĘN┴∙▒█ÖC(j©®)Ų„╚╦Ż¼Š▀ėąČÓĘN▓╗═¼Ą─ą╬æB(t©żi)Ż©ŲĮõüĪóšŠ┴óĪó╩šönŻ®Ż¼┐╔į┌┤┼ł÷┐žųŲŽ┬ė┌▓╗═¼ą╬æB(t©żi)ų«ķg▐D(zhu©Żn)ūāŻ©łD5Ż®Ż¼Ēææ¬(y©®ng)╦┘Č╚śO┐ņŻ©1├ļęįā╚(n©©i)Ż®Ż¼įō▄øÖC(j©®)Ų„Ą─┤¾ąĪ║═ųĖ╝ū╔wŽÓ«ö(d©Īng)Ż©~10mmŻ®ĪŻ
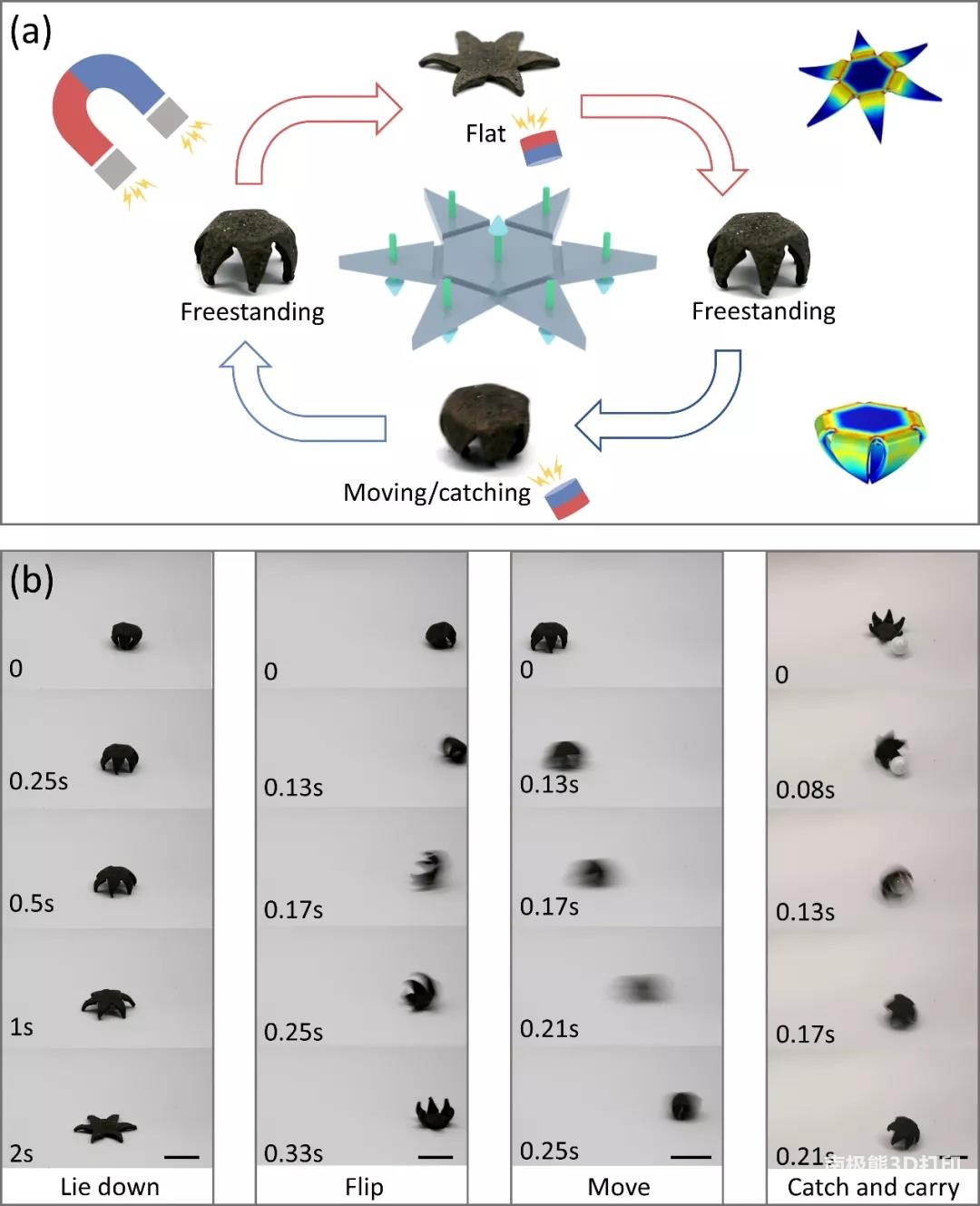
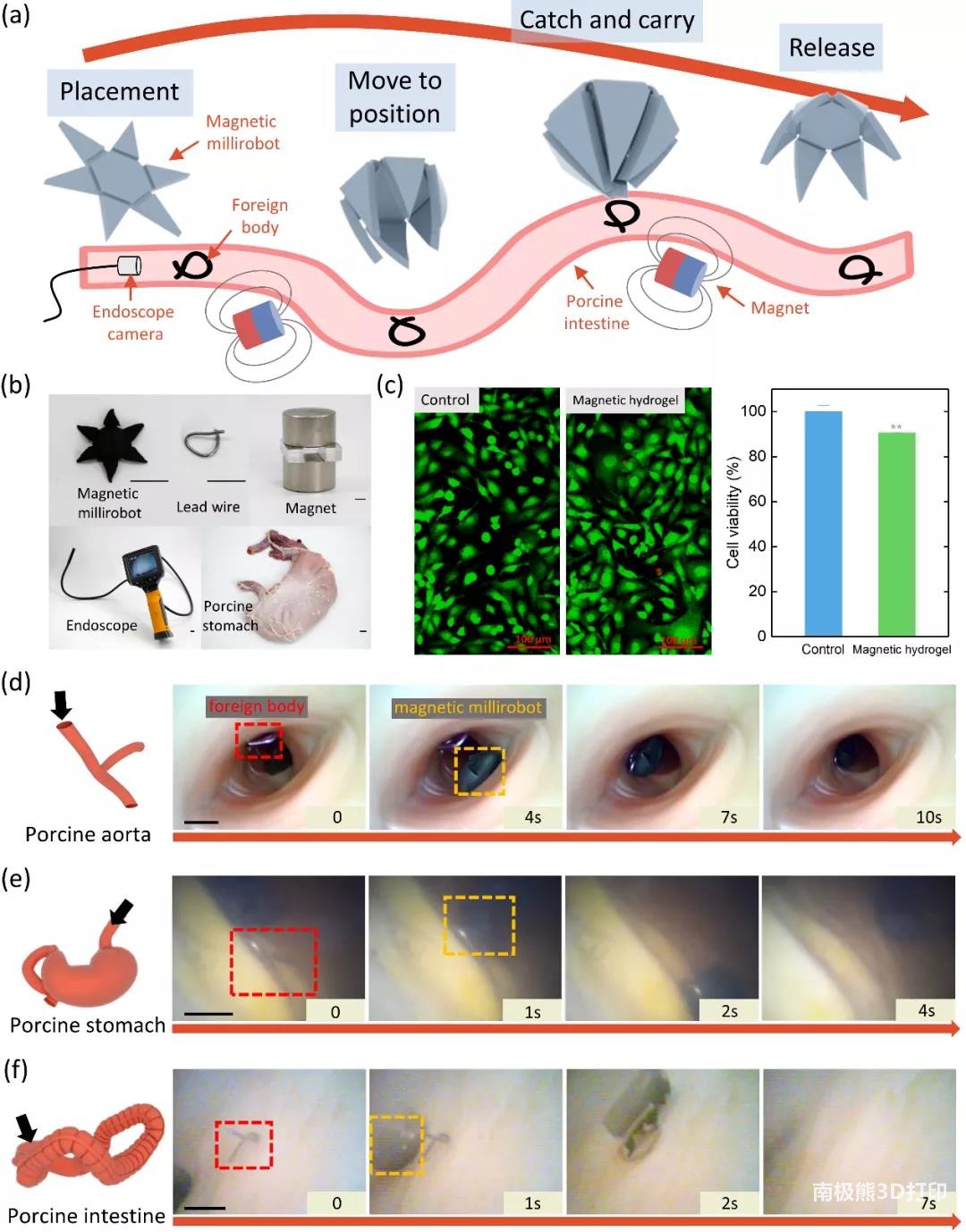
└¹ė├╔Ž╩÷┴∙▒█ÖC(j©®)Ų„╚╦Ż¼ū„š▀š╣╩Š┴╦┤┼ąį▄øÖC(j©®)Ų„Ą─ę╗ĒŚ(xi©żng)Øōį┌æ¬(y©®ng)ė├Ż©łD6Ż®Ż║ŅA(y©┤)Ž╚īóę╗╝■«É╬’Ż©ŃUĮzŻ®Ę┼▀M(j©¼n)äė╬’Ą─Ų„╣┘ųąŻ©ų„äė├}Īó╬Ė║═┤¾─cŻ®Ż¼į┌ā╚(n©©i)ĖQńRė░Ž±Ą─▌oų·Ž┬Ż¼┴∙▒█ÖC(j©®)Ų„╚╦Ž╚╩Ūė╔┤┼ł÷▀b┐žį┌Ų„╣┘ųąęŲäė▓óŪęČ©╬╗─┐ś╦(bi©Īo)Ż¼ļS║¾└¹ė├ūāą╬─▄┴”═Ļ│╔ī”─┐ś╦(bi©Īo)╬’¾wĄ─▓Č½@Ż¼ūŅ║¾į┌┤┼ł÷Ą─ī¦(d©Żo)║ĮŽ┬öyĦ╬’¾wŪ░═∙ųĖČ©Ąž³c(di©Żn)ĪŻĄ├ęµė┌ė▓┤┼ąį▓─┴Žī”═Ō╝ė┤┼ł÷Ą─┐ņ╦┘Ēææ¬(y©®ng)Ż¼š¹éĆ(g©©)īŹ(sh©¬)“×(y©żn)▀^│╠┐╔ęįį┌ÄūĘųńŖų«ā╚(n©©i)═Ļ│╔Ż¼Č°Ūę┤┼ąį╦«─²─zŠ▀ėą▌^Ą═Ą─╝Ü(x©¼)░¹ČŠąįĪŻ
šō╬─╣▓═¼Ą┌ę╗ū„š▀╩Ū╬„░▓Į╗═©┤¾īW(xu©”)║Į╠ņ║Į┐šīW(xu©”)į║┤T╩┐蹊┐╔·īO▓«─ą║═┘ZśsŻ¼═©ėŹū„š▀╩Ū╬„░▓Į╗═©┤¾īW(xu©”)╠ŲŠ┤▀_(d©ó)Ė▒Į╠╩┌║═╚Aųą┐Ų╝╝┤¾īW(xu©”)ÓćųtĖ▒Į╠╩┌ĪŻ ╬„░▓Į╗═©┤¾īW(xu©”)ÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)ÅŖ(qi©óng)Č╚┼cš±äėć°╝ęųž³c(di©Żn)īŹ(sh©¬)“×(y©żn)╩ę×ķĄ┌ę╗å╬╬╗Ż¼╔Ž╩÷蹊┐Ą├ĄĮ┴╦ć°╝ęūį╚╗┐ŲīW(xu©”)╗∙Įųž³c(di©Żn)ć°ļHŻ©Ąžģ^(q©▒)Ż®║Žū„蹊┐ĒŚ(xi©żng)─┐Īó┐Ų╝╝▓┐ųž³c(di©Żn)čą░l(f©Ī)ėŗ(j©¼)äØš■Ė«ķgäō(chu©żng)ą┬║Žū„ĒŚ(xi©żng)─┐Īó├µ╔ŽĒŚ(xi©żng)─┐ĪóŪÓ─ĻĒŚ(xi©żng)─┐Ą─┘Yų·ĪŻ
šō╬─µ£ĮėŻ║Bonan Sun, Rong Jia, Hang Yang, Xi Chen, Kai Tan, Qian Deng, Jingda Tang, Magnetic Arthropod Millirobots Fabricated by 3D-Printed Hydrogels. Advanced Intelligent Systems, 2021, 2100139.
https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202100139
Į³╚šŻ¼╬„░▓Į╗═©┤¾īW(xu©”)╠ŲŠ┤▀_(d©ó)Ė▒Į╠╩┌║═╚Aųą┐Ų╝╝┤¾īW(xu©”)ÓćųtĖ▒Į╠╩┌蹊┐łF(tu©ón)ĻĀ(du©¼)į┌WileyŲņŽ┬ųŪ─▄ŽĄĮy(t©»ng)ŅI(l©½ng)ė“Ų┌┐»Advanced Intelligent Systems░l(f©Ī)▒ĒŅ}×ķĪ░Magnetic Arthropod Millirobots Fabricated by 3D-Printed HydrogelsĪ▒ Ą─╬─š┬ĪŻū„š▀īó3D┤“ėĪ┼cĪ░─Ż░Õ▌oų·┤┼╗»Ī▒ŽÓĮY(ji©”)║ŽŻ¼į┌▒Ż┴¶Å═(f©┤)ļsĮY(ji©”)śŗ(g©░u)Ą─═¼Ģr(sh©¬)Ż¼┐╦Ę■┴╦įŁ╬╗┤┼«ĀŠÄ▌ŗĄ─└¦ļyĪŻ▀M(j©¼n)ę╗▓Į×ķ┤┼ąį▄øÖC(j©®)Ų„įO(sh©©)ėŗ(j©¼)┴╦ŅÉ╦Ų╣Ø(ji©”)ų½äė╬’Ī░ĻP(gu©Īn)╣Ø(ji©”)Ī▒Ą─ĮY(ji©”)śŗ(g©░u)Ż¼īŹ(sh©¬)¼F(xi©żn)┴╦Ī░ĻP(gu©Īn)╣Ø(ji©”)Ī▒▓┐╬╗ĘŪŠ∙ä“ÅØŪ·äéČ╚Ą─š{(di©żo)┐žŻ¼╩╣Ųõ┐╔ęįį┌▌^ąĪ┤┼ł÷Ą─“ī(q©▒)äėŽ┬▀_(d©ó)ĄĮĖ³╝čĄ─ūāą╬ą¦╣¹Ż¼ęį┤╦įO(sh©©)ėŗ(j©¼)┴╦▒ŖČÓūāą╬ĮY(ji©”)śŗ(g©░u)ĪŻū„š▀š╣╩Š┴╦į┌ė░Ž±╩ųČ╬▌oų·Ž┬Ż¼└¹ė├┤┼ł÷▀b┐ž╦«─²─zÖC(j©®)Ų„╚╦Å─žiĄ─▓╗═¼Ų„╣┘ųąČ©╬╗Īóūź╚Ī║═ęŲäė═ŌüĒ«É╬’Ż¼ĻU├„┴╦┤┼ąį▄øÖC(j©®)Ų„ū„×ķ╬óą═╩ųąg(sh©┤)ÖC(j©®)Ų„╚╦Ą─æ¬(y©®ng)ė├Ū░Š░ĪŻ
1 ┤┼ąįūāą╬ĮY(ji©”)śŗ(g©░u)Ą─įO(sh©©)ėŗ(j©¼)Īó▓─┴Ž║Ž│╔
łD1 ╣Ø(ji©”)ų½äė╬’åó░l(f©Ī)Ą─┤┼ąį▄ø¾wÖC(j©®)Ų„╚╦Ą─įO(sh©©)ėŗ(j©¼)║═ųŲįņ
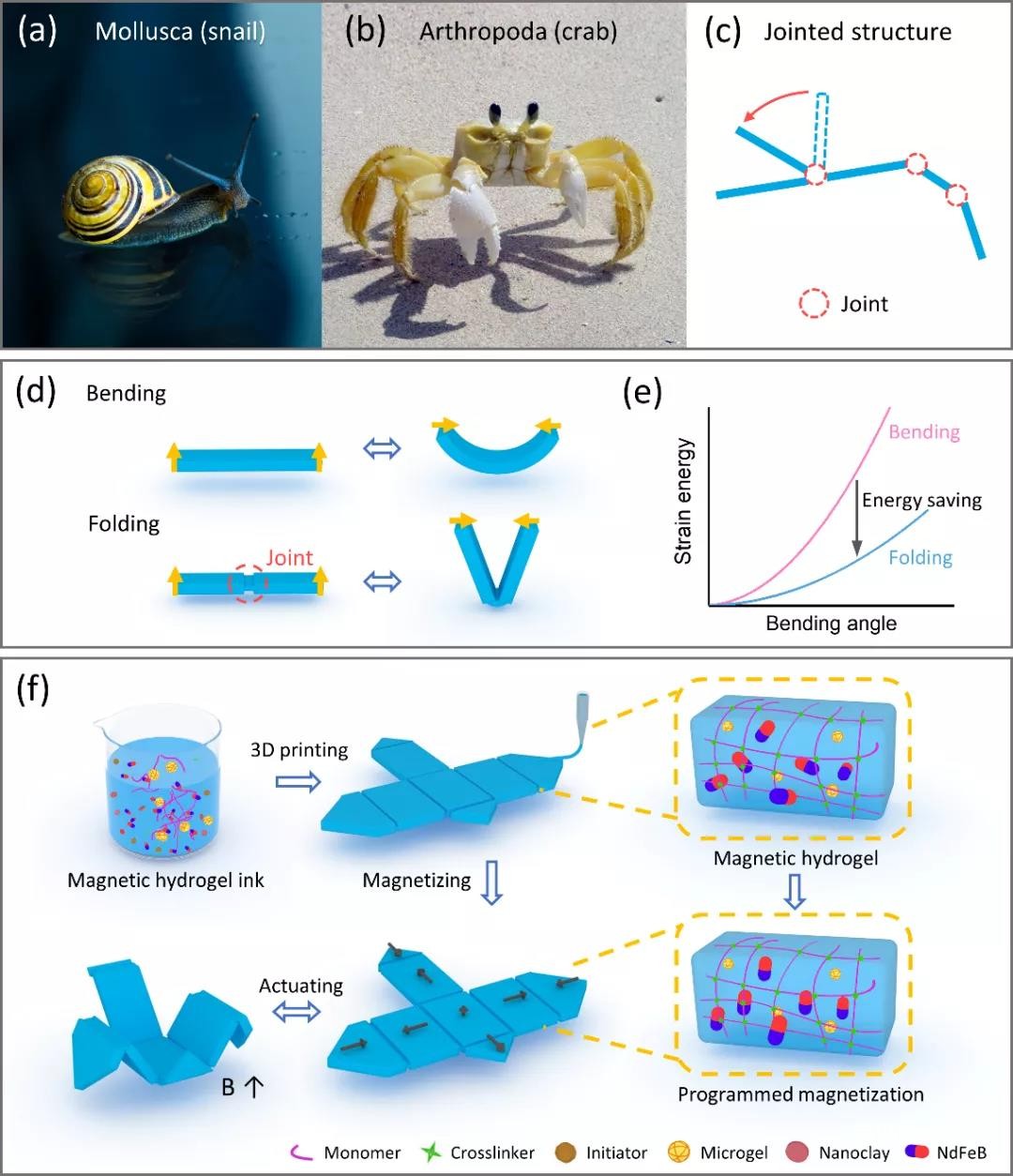
ū„š▀═©▀^ōĮļsė▓┤┼ąįŅw┴ŻŻ©NdFeBŻ®Ą─3D┤“ėĪ┤┼ąį╦«─²─zųŲįņ┤┼ąį▄ø¾wÖC(j©®)Ų„╚╦Ż¼ė▓┤┼Ņw┴Ż┐╔▀M(j©¼n)ąą┤┼«ĀŠÄ▌ŗŻ¼╩╣▓─┴Žį┌═Ō╝ė┤┼ł÷Ž┬«a(ch©Żn)╔·┐╔ŠÄ│╠Å═(f©┤)ļsūāą╬ĪŻĘ┬╔·Ī░ĻP(gu©Īn)╣Ø(ji©”)Ī▒įO(sh©©)ėŗ(j©¼)īó▄øÖC(j©®)Ų„ųą│ŻęŖĄ─ÅØŪ·ūāą╬Ż©▓─┴Žš¹¾w░l(f©Ī)╔·ūāą╬Ż®▐D(zhu©Żn)╗»×ķš█»Būāą╬Ż©ų„¾wć·└@ĻP(gu©Īn)╣Ø(ji©”)▐D(zhu©Żn)äėŻ®Ż¼╩╣ŽÓ═¼┤┼ł÷Ž┬Ą─ūāą╬ĮŪČ╚į÷┤¾Ż¼═¼Ģr(sh©¬)ĮĄĄ═┴╦─▄┴┐Ž¹║─Ż©łD1Ż®ĪŻ
łD2 ║¼╬óŪ“Ą─ė▓┤┼ąį╦«─²─zĄ─║Ž│╔
▓─┴Ž║Ž│╔įöęŖJ. Mater. Chem. B, 2021, DOI: 10.1039/D1TB01694FŻ©https://pubs.rsc.org/en/content/articlelanding/2021/TB/D1TB01694FŻ®ĪŻįōė▓┤┼ąį╦«─²─z╠Ē╝ė┴╦╦«─²─z╬óŪ“Ż¼═¼Ģr(sh©¬)ŲĄĮļpŠW(w©Żng)Įj(lu©░)į÷ĒgĪóį÷│Ē║═3D┤“ėĪĄ─ą¦╣¹Ż¼┤_▒Ż┴╦ė▓┤┼Ņw┴Żį┌╦«─²─z╗∙¾wųąĄ─Š∙ä“Ęų▓╝╝░┤┼«ĀŠÄ▌ŗŻ©łD2Ż®ĪŻ
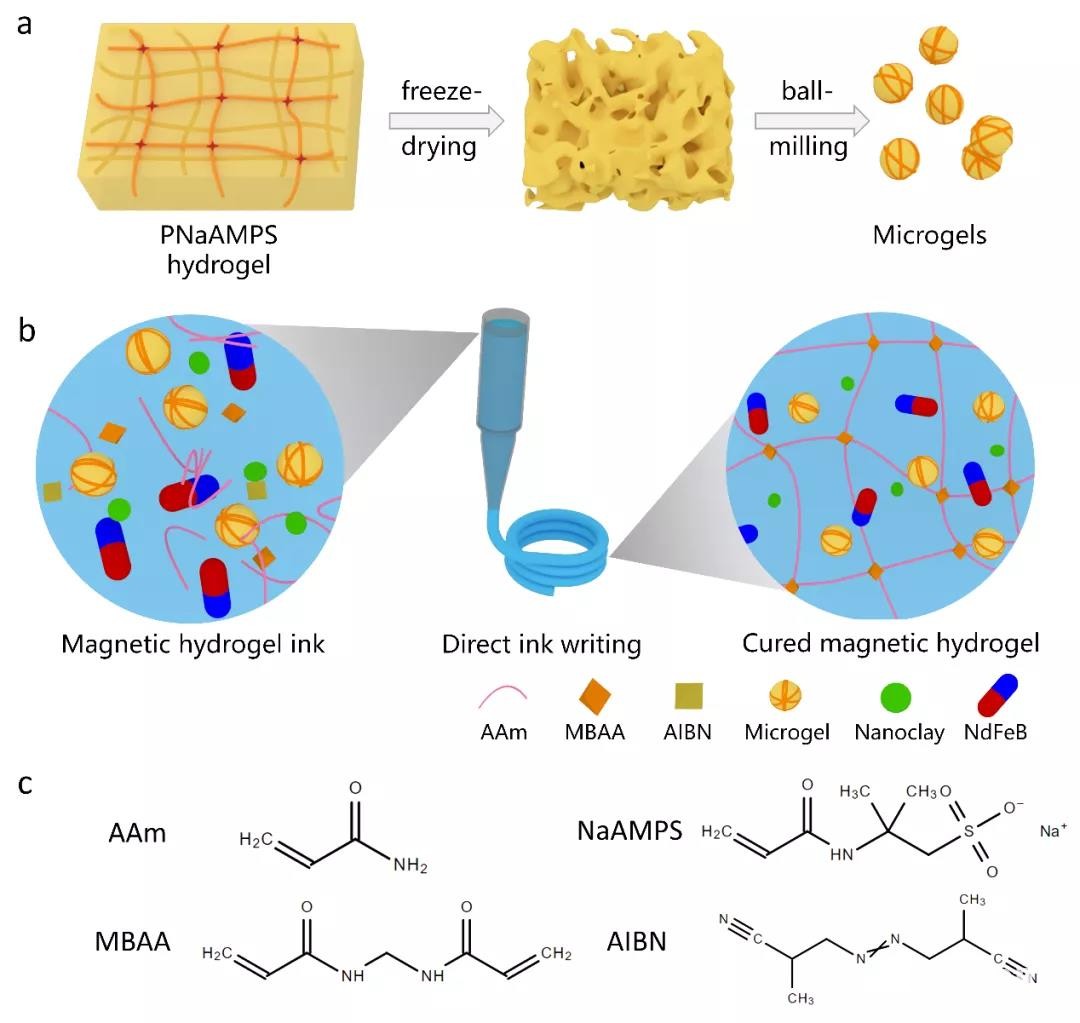
ū„š▀蹊┐┴╦┤┼ąį▄øÖC(j©®)Ų„Ą─╗∙▒Š┴”īW(xu©”)ĮY(ji©”)śŗ(g©░u)Ż©æę▒█┴║Ż®į┌┤┼ł÷Ž┬Ą─ūāą╬ąą×ķŻ©łD3Ż®Ż¼▓ó═©▀^īŹ(sh©¬)“×(y©żn)║═öĄ(sh©┤)ųĄĘ┬šµī”▒╚┴╦ÅØŪ·║═š█»Bā╔ĘNūāą╬─Ż╩ĮŻ¼░l(f©Ī)¼F(xi©żn)═¼śė┤┼ł÷Ž┬Ż¼š█»B─Ż╩ĮĄ─ūāą╬ĮŪČ╚Ė³┤¾Ż¼ūC├„┴╦ĻP(gu©Īn)╣Ø(ji©”)įO(sh©©)ėŗ(j©¼)Ą─ėąą¦ąįŻ¼╠ĮŠ┐┴╦š█║█Äū║╬ģóöĄ(sh©┤)Ą─ė░ĒæŻ¼×ķ┤╦║¾Ą─ÖC(j©®)Ų„╚╦ĮY(ji©”)śŗ(g©░u)įO(sh©©)ėŗ(j©¼)╠ß╣®┴╦└Ēšōę└ō■(j©┤)ĪŻ
łD3 ┤┼ąį▄ø¾wÖC(j©®)Ų„╚╦Ą─╗∙▒ŠĮY(ji©”)śŗ(g©░u)å╬į¬ūāą╬蹊┐
2 ┤┼ąį▄ø¾wÖC(j©®)Ų„╚╦Ą─“ī(q©▒)äėūāą╬║═æ¬(y©®ng)ė├š╣╩Š
łD4 ║¼š█║█Ą─┤┼ąįūāą╬ĮY(ji©”)śŗ(g©░u)
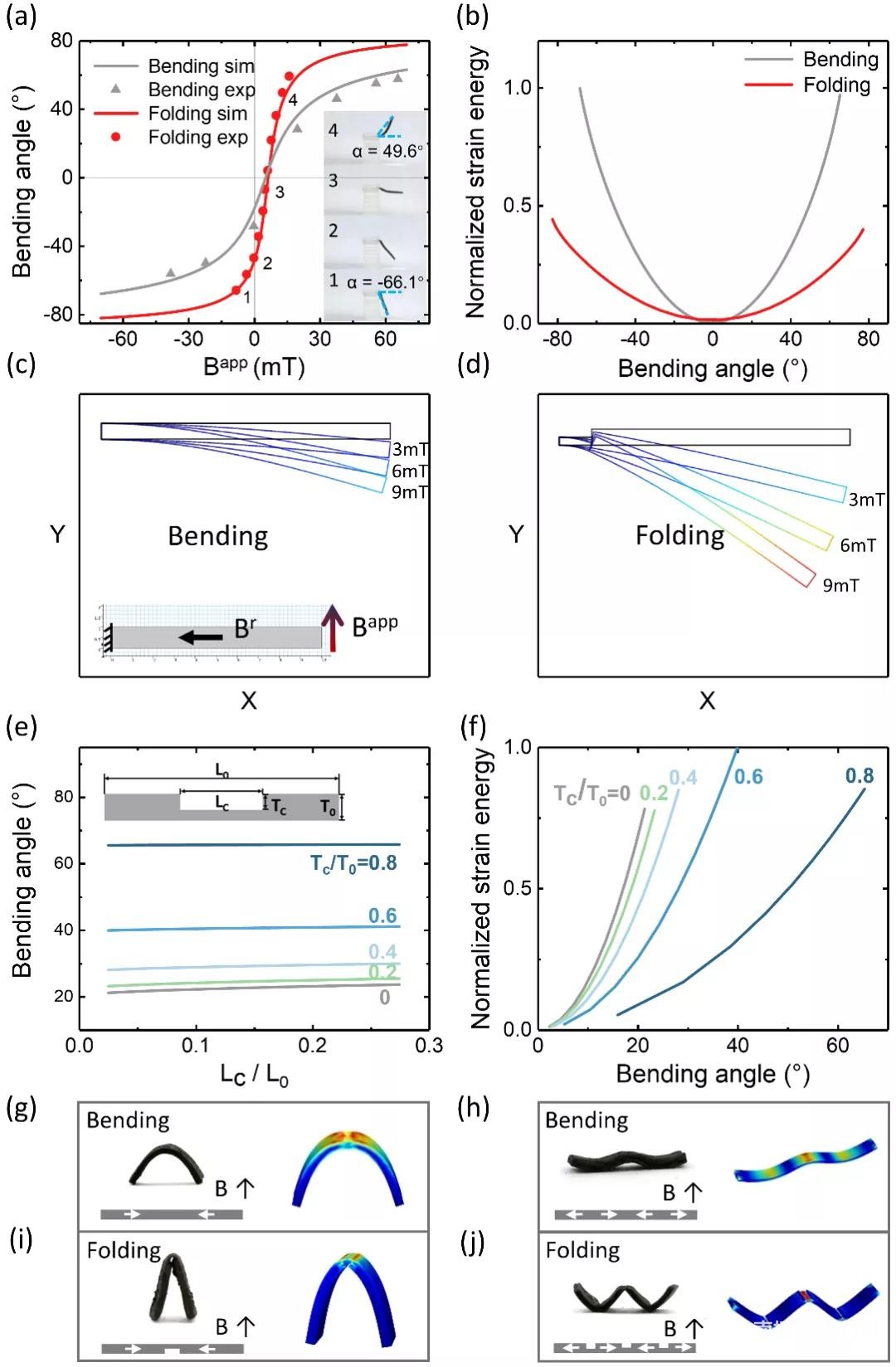
ū„š▀īŹ(sh©¬)¼F(xi©żn)┴╦ČÓĘN┤┼ąįūāą╬ĮY(ji©”)śŗ(g©░u)į┌┤┼ł÷“ī(q©▒)äėŽ┬Ą─┐ņ╦┘Īó┐╔ųžÅ═(f©┤)ūāą╬“ī(q©▒)äėŻ©łD4Ż®Ż¼▓óŪęė├ėąŽ▐į¬Ę┬šµ▄ø╝■ŅA(y©┤)£y┴╦▄øÖC(j©®)Ų„Ą─ūāą╬ĪŻ▀M(j©¼n)ę╗▓ĮįO(sh©©)ėŗ(j©¼)ųŲįņ┴╦ę╗ĘN┴∙▒█ÖC(j©®)Ų„╚╦Ż¼Š▀ėąČÓĘN▓╗═¼Ą─ą╬æB(t©żi)Ż©ŲĮõüĪóšŠ┴óĪó╩šönŻ®Ż¼┐╔į┌┤┼ł÷┐žųŲŽ┬ė┌▓╗═¼ą╬æB(t©żi)ų«ķg▐D(zhu©Żn)ūāŻ©łD5Ż®Ż¼Ēææ¬(y©®ng)╦┘Č╚śO┐ņŻ©1├ļęįā╚(n©©i)Ż®Ż¼įō▄øÖC(j©®)Ų„Ą─┤¾ąĪ║═ųĖ╝ū╔wŽÓ«ö(d©Īng)Ż©~10mmŻ®ĪŻ
łD5 ┤┼ł÷“ī(q©▒)äėŽ┬Š▀ėąČÓĘN▀\(y©┤n)äė─Ż╩ĮĄ─┴∙▒█▄ø¾wÖC(j©®)Ų„╚╦
└¹ė├╔Ž╩÷┴∙▒█ÖC(j©®)Ų„╚╦Ż¼ū„š▀š╣╩Š┴╦┤┼ąį▄øÖC(j©®)Ų„Ą─ę╗ĒŚ(xi©żng)Øōį┌æ¬(y©®ng)ė├Ż©łD6Ż®Ż║ŅA(y©┤)Ž╚īóę╗╝■«É╬’Ż©ŃUĮzŻ®Ę┼▀M(j©¼n)äė╬’Ą─Ų„╣┘ųąŻ©ų„äė├}Īó╬Ė║═┤¾─cŻ®Ż¼į┌ā╚(n©©i)ĖQńRė░Ž±Ą─▌oų·Ž┬Ż¼┴∙▒█ÖC(j©®)Ų„╚╦Ž╚╩Ūė╔┤┼ł÷▀b┐žį┌Ų„╣┘ųąęŲäė▓óŪęČ©╬╗─┐ś╦(bi©Īo)Ż¼ļS║¾└¹ė├ūāą╬─▄┴”═Ļ│╔ī”─┐ś╦(bi©Īo)╬’¾wĄ─▓Č½@Ż¼ūŅ║¾į┌┤┼ł÷Ą─ī¦(d©Żo)║ĮŽ┬öyĦ╬’¾wŪ░═∙ųĖČ©Ąž³c(di©Żn)ĪŻĄ├ęµė┌ė▓┤┼ąį▓─┴Žī”═Ō╝ė┤┼ł÷Ą─┐ņ╦┘Ēææ¬(y©®ng)Ż¼š¹éĆ(g©©)īŹ(sh©¬)“×(y©żn)▀^│╠┐╔ęįį┌ÄūĘųńŖų«ā╚(n©©i)═Ļ│╔Ż¼Č°Ūę┤┼ąį╦«─²─zŠ▀ėą▌^Ą═Ą─╝Ü(x©¼)░¹ČŠąįĪŻ
łD6 ┤┼ąį▄øÖC(j©®)Ų„╚╦ė├ė┌╣▄Ū╗ųąĄ─«É╬’ūź╚Ī
šō╬─╣▓═¼Ą┌ę╗ū„š▀╩Ū╬„░▓Į╗═©┤¾īW(xu©”)║Į╠ņ║Į┐šīW(xu©”)į║┤T╩┐蹊┐╔·īO▓«─ą║═┘ZśsŻ¼═©ėŹū„š▀╩Ū╬„░▓Į╗═©┤¾īW(xu©”)╠ŲŠ┤▀_(d©ó)Ė▒Į╠╩┌║═╚Aųą┐Ų╝╝┤¾īW(xu©”)ÓćųtĖ▒Į╠╩┌ĪŻ ╬„░▓Į╗═©┤¾īW(xu©”)ÖC(j©®)ąĄĮY(ji©”)śŗ(g©░u)ÅŖ(qi©óng)Č╚┼cš±äėć°╝ęųž³c(di©Żn)īŹ(sh©¬)“×(y©żn)╩ę×ķĄ┌ę╗å╬╬╗Ż¼╔Ž╩÷蹊┐Ą├ĄĮ┴╦ć°╝ęūį╚╗┐ŲīW(xu©”)╗∙Įųž³c(di©Żn)ć°ļHŻ©Ąžģ^(q©▒)Ż®║Žū„蹊┐ĒŚ(xi©żng)─┐Īó┐Ų╝╝▓┐ųž³c(di©Żn)čą░l(f©Ī)ėŗ(j©¼)äØš■Ė«ķgäō(chu©żng)ą┬║Žū„ĒŚ(xi©żng)─┐Īó├µ╔ŽĒŚ(xi©żng)─┐ĪóŪÓ─ĻĒŚ(xi©żng)─┐Ą─┘Yų·ĪŻ
šō╬─µ£ĮėŻ║Bonan Sun, Rong Jia, Hang Yang, Xi Chen, Kai Tan, Qian Deng, Jingda Tang, Magnetic Arthropod Millirobots Fabricated by 3D-Printed Hydrogels. Advanced Intelligent Systems, 2021, 2100139.
https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202100139
(ž¤(z©”)╚╬ŠÄ▌ŗŻ║admin)

╔Žę╗Ų¬Ż║č█ęŖ×ķīŹ(sh©¬)Ż║╣∙ŹśłF(tu©ón)ĻĀ(du©¼)═©▀^3D┤“ėĪĮę╩Š─cĄ└╝Ü(x©¼)░¹äėæB(t©żi)Ęų╗»
Ž┬ę╗Ų¬Ż║ÅB┤¾īOĄ└║ŃĮ╠╩┌šnŅ}ĮMĪČSmallĪĘŻ║į┌│¼▓─┴ŽųŲįņŅI(l©½ng)ė“╚ĪĄ├ą┬▀M(j©¼n)š╣
Ž┬ę╗Ų¬Ż║ÅB┤¾īOĄ└║ŃĮ╠╩┌šnŅ}ĮMĪČSmallĪĘŻ║į┌│¼▓─┴ŽųŲįņŅI(l©½ng)ė“╚ĪĄ├ą┬▀M(j©¼n)š╣
ŽÓĻP(gu©Īn)ā╚(n©©i)╚▌
 ųē¶╔·╬’3D┤“ėĪ╚╦įņĮM┐ŚŲ„
ųē¶╔·╬’3D┤“ėĪ╚╦įņĮM┐ŚŲ„ 16ÜqĖ▀ųą╔·Ī░╩ų┤ĻĪ▒š█»BŲ┴
16ÜqĖ▀ųą╔·Ī░╩ų┤ĻĪ▒š█»BŲ┴ 3D Systems äō(chu©żng)╩╝╚╦Chuck H
3D Systems äō(chu©żng)╩╝╚╦Chuck H ģŪ÷╬╚Aį║╩┐ŅI(l©½ng)ŃĢĮ©įO(sh©©)╠Kų▌┤¾
ģŪ÷╬╚Aį║╩┐ŅI(l©½ng)ŃĢĮ©įO(sh©©)╠Kų▌┤¾ ╬õØh╚²ŠS╠š┤╔┐éĮø(j©®ng)└Ē±RزŻ║
╬õØh╚²ŠS╠š┤╔┐éĮø(j©®ng)└Ē±RزŻ║ └ŅĘĮš²Ż║ųąć°į÷▓─ųŲįņ«a(ch©Żn)śI(y©©)
└ŅĘĮš²Ż║ųąć°į÷▓─ųŲįņ«a(ch©Żn)śI(y©©)
- Īżųē¶╔·╬’3D┤“ėĪ╚╦įņĮM┐ŚŲ„╣┘Ī¬▓®╩┐╔·┴║
- Īż16ÜqĖ▀ųą╔·Ī░╩ų┤ĻĪ▒š█»BŲ┴╩ųÖC(j©®)ŻĪ3D┤“ėĪ
- Īż3D Systems äō(chu©żng)╩╝╚╦Chuck Hull«ö(d©Īng)▀x├└ć°
- ĪżģŪ÷╬╚Aį║╩┐ŅI(l©½ng)ŃĢĮ©įO(sh©©)╠Kų▌┤¾īW(xu©”)Įī┘▓─┴Ž┼c
- Īż╬õØh╚²ŠS╠š┤╔┐éĮø(j©®ng)└Ē±RزŻ║╣żśI(y©©)╗»æ¬(y©®ng)ė├┬õ
- Īż└ŅĘĮš²Ż║ųąć°į÷▓─ųŲįņ«a(ch©Żn)śI(y©©)░l(f©Ī)š╣Č┤Žż¶▀ĪČ
- ĪżÅł¹ÉŠĻŻ║į÷▓─ųŲįņ╝╝ąg(sh©┤)░l(f©Ī)š╣äėæB(t©żi)Ż¼Ą┬ć°Fr
- ĪżŚŅĢį╣ŌŻ║į÷▓─ųŲįņčbéõ┐╔┐┐ąįÖz£y┘x─▄ą┬
ūŅą┬ā╚(n©©i)╚▌
- Īżųē¶╔·╬’3D┤“ėĪ╚╦įņĮM┐ŚŲ„╣┘Ī¬▓®╩┐╔·┴║
- Īż16ÜqĖ▀ųą╔·Ī░╩ų┤ĻĪ▒š█»BŲ┴╩ųÖC(j©®)ŻĪ3D┤“ėĪ
- Īż3D Systems äō(chu©żng)╩╝╚╦Chuck Hull«ö(d©Īng)▀x├└ć°
- ĪżģŪ÷╬╚Aį║╩┐ŅI(l©½ng)ŃĢĮ©įO(sh©©)╠Kų▌┤¾īW(xu©”)Įī┘▓─┴Ž┼c
- Īż╬õØh╚²ŠS╠š┤╔┐éĮø(j©®ng)└Ē±RزŻ║╣żśI(y©©)╗»æ¬(y©®ng)ė├┬õ
- Īż└ŅĘĮš²Ż║ųąć°į÷▓─ųŲįņ«a(ch©Żn)śI(y©©)░l(f©Ī)š╣Č┤Žż¶▀ĪČ
- ĪżÅł¹ÉŠĻŻ║į÷▓─ųŲįņ╝╝ąg(sh©┤)░l(f©Ī)š╣äėæB(t©żi)Ż¼Ą┬ć°Fr
- ĪżŚŅĢį╣ŌŻ║į÷▓─ųŲįņčbéõ┐╔┐┐ąįÖz£y┘x─▄ą┬
- Īż└Ņ“qŻ║Įī┘į÷▓─ųŲįņčbéõ┘|(zh©¼)┴┐┐╔┐┐ąį╠Į╦„
- Īż¹£Ųµ╣ŌŻ║Įī┘3D┤“ėĪį┌╣Ū┐ŲųąĄ─æ¬(y©®ng)ė├
═Ų╦]ā╚(n©©i)╚▌
 ųą┐Ųį║┴ų÷╬łF(tu©ón)ĻĀ(du©¼)To
ųą┐Ųį║┴ų÷╬łF(tu©ón)ĻĀ(du©¼)To īŻįLŪÕõhäō(chu©żng)╩╝╚╦ę”
īŻįLŪÕõhäō(chu©żng)╩╝╚╦ę” šŃĮŁ┤¾īW(xu©”)┘Rė└Į╠╩┌
šŃĮŁ┤¾īW(xu©”)┘Rė└Į╠╩┌ ģŪę▌’wŻ║ģ^(q©▒)ēKµ£╝╝
ģŪę▌’wŻ║ģ^(q©▒)ēKµ£╝╝ ³SŠSį║╩┐łF(tu©ón)ĻĀ(du©¼)Ż║3D
³SŠSį║╩┐łF(tu©ón)ĻĀ(du©¼)Ż║3D īOĻæę▌Į╠╩┌Ż║Ė▀Ęų
īOĻæę▌Į╠╩┌Ż║Ė▀Ęų¤ß³c(di©Żn)ā╚(n©©i)╚▌
- ĪżŚŅ䔯║ōĒ▒¦Ģr(sh©¬)┤·└╦│▒Ż¼3D┤“ėĪŻ¼╬┤üĒĪ░╠ņ
- ĪżÅłąl(w©©i)╝tį║╩┐łF(tu©ón)ĻĀ(du©¼)Ż║║Į╠ņĖ▀ąį─▄▒Ī▒┌śŗ(g©░u)╝■Ą─
- ĪżŪÕ╚A┤¾īW(xu©”)ę”īW(xu©”)õhĮ╠╩┌łF(tu©ón)ĻĀ(du©¼)Ż║3D┤“ėĪ▀B└m(x©┤)└w
- ĪżīŻįLŪÕõhäō(chu©żng)╩╝╚╦ę”ųŠõhŻ¼ū÷3D┤“ėĪ«a(ch©Żn)ŲĘĪ░
- Īż£½╗█Ų╝Į╠╩┌╚ļ▀xĻā╬„╩ĪĪ░╠žų¦ėŗ(j©¼)äØĪ▒┐Ų╝╝
- Īż┤„īĪ╚ųį║╩┐łF(tu©ón)ĻĀ(du©¼)Ī░Č©ųŲ╩Įį÷▓─ųŲįņŽźĻP(gu©Īn)╣Ø(ji©”)
- Īż─Ž┐Ų┤¾ĪČCoCoĪĘŠC╩÷Ż║▀B└m(x©┤)└wŠSį÷ÅŖ(qi©óng)Å═(f©┤)║Ž
- Īż├└ć°║Ż▄Ŗū„æ(zh©żn)▓┐ķLŻ║3D┤“ėĪ─▄įņ║╦╬õ
- Īżć°Ę└┐Ų╝╝┤¾īW(xu©”)Į╠╩┌═§╚║Ż║3D┤“ėĪį┌▄Ŗ╩┬æ¬(y©®ng)
- Īż╬õØh╚²ŠS╠š┤╔┐éĮø(j©®ng)└Ē±RزŻ║╣żśI(y©©)╗»æ¬(y©®ng)ė├┬õ


