3ds MaxĮ╠│╠Ż║äōĮ©Ą°Ą╣äė«ŗ
įOų├šn│╠Ż║
-
┤“ķ_ slip_start.maxĪŻ
-
ėęµIå╬ō¶ęĢ┐┌├¹ĘQ▓óīó╦∙’@╩ŠĄ─ā╚╚▌Ė─×ķĪ░ŠĆ┐“Ī▒ĪŻ
-
▀xųąā╔ūŃäė╬’Ą─╚╬ęŌ▓┐ĘųĪŻ
-
┤“ķ_Ī░▀\äėĪ▒├µ░ÕĪŻ
¼Fį┌Ż¼Biped ┐žųŲ╠Äė┌┐╔ė├ĀŅæBĪŻ
┴╦ĮŌäė«ŗŻ║
-
═ŽäėĢrķg╗¼ēK▓źĘ┼äė«ŗĪŻ
įōā╔ūŃäė╬’ū▀┴╦┤¾Ė┼ 5 ▓Į

ėŗäØ╩Ū╩╣įōā╔ūŃäė╬’į┌Ą┌ 5 ▓Į╗¼Ą╣ĪŻįOŽļę╗éĆŽŃĮČŲżŠ═į┌─Ūę╗▓Į╔ŽĪŻ
-
═ŽäėĢrķg╗¼ēKĄĮĄ┌ 75 ļŻ¼į┌▀@└’─_Ė·į┌Ą┌ 5 ▓ĮĄ─Ģr║“ū▓ō¶Ąž├µĪŻĘ┼┤¾ęĢ┐┌ęūė┌┐┤ĄĮ─_▓┐ĪŻ
-
į┌ęĢ┐┌ųą▀xųą╦{╔½Ą─ī”Ž¾ Bip01 L FootĪŻ
’@╩Š▌S³cĪŻ

─_Ė·Ž“Ž┬Įėė|
-
į┌Ī░▀\äėĪ▒├µ░Õ╔ŽŻ¼┤“ķ_Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌ĪŻš╣ķ_Ī░IKĪ▒Ö┌┐╔ęį┐┤ĄĮĪ░IK ╗ņ║ŽĪ▒║═Ųõ╦¹┐žųŲĪŻ
į┌ęĢ┐┌ųąŻ¼įō▌S³c’@╩Š×ķę╗éĆ╝t³c▓óŪęį┌▄ē█EÖ┌’@╩ŠĻPµI³cĪŻ─_▓┐į┌Ą┌ 75 ļĄ─ĻPµI³c╩Ūę╗éĆ▓╚╠żĻPµI³cĪŻ▀@▒Ē╩ŠĪ░IK ╗ņ║ŽĪ▒įO×ķ 1Ż¼Č°Ūęåóė├Ī░▀BĮėĄĮ╔Žę╗éĆ IKĪ▒▀xĒŚĪŻ
Ī░IK ╗ņ║ŽĪ▒×ķ 1Ż¼▀@īó▌S║═─_▓┐µiČ©ė┌ĄžŲĮ├µ╔ŽĪŻĪ░▀BĮėĄĮ╔Žę╗éĆ IK ĻPµI³cĪ▒┐╝æ]┴╦į┌╔Žę╗ĻPµI³c╔Ž─_▓┐Ą─ą²▐D▓óįćłD┼cų«Ųź┼õĪŻ
-
═ŽäėĢrķg╗¼ēK└^└mØLäėäė«ŗŻ¼ė^▓ņ▌S³cĄ─ęŲäėĪŻ

▌S³cäė«ŗļSĢrķgūā╗»ĪŻ
-
į┌Ą┌ 78 ļŻ¼▌S³cęŲų┴─_Ė·Ą─═Ō▓┐ĪŻ
-
į┌Ą┌ 84 ļŻ¼▌SęŲų┴─_ųĖĪŻ
-
į┌Ą┌ 83 ļŻ¼─_Ė·╠¦ŲĄĮ┐šųąĪŻ┤╦ļų«║¾▀@ų╗─_ļxķ_ūŃ█E═Ż┴¶į┌┐šųąĪŻ
╠ß╩ŠŻ║į┌ 3ds Max ĀŅæBÖ┌ųąŻ¼åóė├Ī░ĻPµI³c─Ż╩ĮŪąōQĪ▒░┤Ōo┐╔ęįīŹ¼FĻPµI³cų«ķgĄ─╠°▄SĪŻ▀@╩╣äė«ŗĖ³ęūė┌┴╦ĮŌĪŻį┌Ģrķg╗¼ēK╔ŽŻ¼å╬ō¶Ū░▀M╗“║¾═╦╝²Ņ^į┌Ū░ę╗éĆ╗“║¾ę╗éĆĻPµI³cų«ķgęŲäėĪŻę▓┐╔ęį╩╣ė├ VCR ┐žųŲųąĄ─Ī░Ž┬ę╗ļĪ▒║═Ī░─®Ä¼Ī▒░┤Ōo╗“š▀╩╣ė├µI▒P╔ŽĄ─ < ║═ > µIĪŻ
-
äōĮ©ę╗éĆ╗¼äėūŃ█EŻ║
-
┤_▒Żī”Ž¾ Bip01 L Foot ╚į×ķ▀xųąĀŅæBĪŻ
-
 ┤“ķ_Ī░ĻPµI³c─Ż╩ĮĪ▒Ż¼╚╗║¾▐Dų┴Ą┌ 75 ļĪŻ
┤“ķ_Ī░ĻPµI³c─Ż╩ĮĪ▒Ż¼╚╗║¾▐Dų┴Ą┌ 75 ļĪŻ
-
 į┌Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌ųąŻ¼å╬ō¶Ī░įOų├╗¼äėĻPµI³cĪ▒ĪŻ
į┌Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌ųąŻ¼å╬ō¶Ī░įOų├╗¼äėĻPµI³cĪ▒ĪŻ
-
Ū░▀Mų┴Ž┬ę╗ļŻ©Ą┌ 78 ļŻ®ĪŻ
-
ą²▐D─_▓┐╩╣─_ųĖ╚į▒Ż│ų═Ż┴¶į┌┐šųąĪŻ

ą²▐D─_▓┐
-
īó─_▓┐Ž“Ū░ęŲäėŻ¼╩╣ų«į┌ūŃ█EĄ─ Gizmo ╔ŽŽ“Ū░╗¼äėĪŻ

╗¼äėūŃ█E
-
į┌Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌ųąŻ¼å╬ō¶Ī░įOų├╗¼äėĻPµI³cĪ▒ĪŻ
▌S³c╠°ų┴─_▓┐ą┬Ą─╬╗ų├ĪŻ¼Fį┌ūŃ█E’@╩Š×ķ┤®▀^╦³Ą─ę╗ŚlŠĆĪŻ▀@▒Ē╩Š╦¹╩Ūę╗éĆ╗¼äėūŃ█EĪŻ─_▓┐┐╔ęį╗¼▀^╗“╗¼ļxūŃ█EŻ¼ī”ĄžŲĮ├µę▓╩Ūę╗śėĪŻ

▌S³c╠°ų┴ūŃ█EĪŻ
-
Ū░▀Mų┴Ž┬ę╗ĻPµIļį┌Ą┌ 84 ļĪŻįOų├ę╗éĆ╗¼äėĻPµI³cĪŻ
-
į┌Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌╔ŽĄ─Ī░IK ┐žųŲŲ„Ī▒ĮMųąŻ¼å╬ō¶Ī░▀xō±▌SĪ▒░┤ŌoĪŻ╚╗║¾Ż¼į┌ęĢ┐┌ųąå╬ō¶╬╗ė┌─_Ė·║¾▓┐ųąą─Ą─╦{╔½Ą─▌SĪŻ
įō▌Sūā│╔╝t╔½’@╩Š╦³ęč▒╗▀xųąĪŻ

į┌─_Ė·╠Ä▀xųą▌S
-
Į¹ė├Ī░▀xō±▌SĪ▒ĪŻ
-
ą²▐D─_▓┐Ż¼╚╗║¾īó╦³╠¦ŲĄĮ┐šųąŻ¼╩╣─_▓┐ķ_╩╝Ž“╔Ž╠▀äėĪŻ

į┌Ą┌ 84 ļ─_▓┐ą²▐D▓ó╠¦Ų
-
įOų├ę╗éĆ╗¼äėĻPµI³cĪŻ
▌S³cį┘┤╬Å─ūŃ█E╠°ų┴─_▓┐ĪŻ

╠ß╩ŠŻ║╚ń╣¹─_▓┐ļxķ_ūŃ█E▓óį┌┐šųąŻ¼ät╩╣ė├ūįė╔ĻPµI³cĪŻ╚╗Č°Ż¼ę╗éĆ╗¼äėĻPµI³cę▓┐╔ęįīó─_▓┐╠¦ļxūŃ█EĪŻ
-
ęŲäėĢrķg╗¼ēKŻ¼▓źĘ┼äė«ŗĪŻ
ā╔ūŃäė╬’Ą─ū¾─_į┌Ą┌ 5 ▓Į╗¼ļxūŃ█EĪŻ
Ž┬ę╗▓ĮŻ¼äōĮ©ę╗éĆūįė╔ą╬╩Įų▄Ų┌Ż¼┐╔ęįūįė╔Ą─įOų├ā╔ūŃäė╬’į┌┐šųąęŲäėĄ─äė«ŗĪŻ
äōĮ©ę╗éĆūįė╔ą╬╩Įų▄Ų┌Ż║
į┌ūŃ█Eäė«ŗųą╩╣ė├ūįė╔ą╬╩Įų▄Ų┌į╩įSīó Biped į┌ūŃ█Eäė«ŗųą╩╣ė├Ą─ūįäėŽĄĮyÆņŲĪŻ
╚ń╣¹į┌Ą┌ 5 éĆūŃ█E║═Ą┌ 6 éĆūŃ█Eų«ķgįOų├ę╗éĆūįė╔ą╬╩Įų▄Ų┌Ż¼īó┐╔ęįīŹ¼Fā╔ūŃäė╬’į┌ĄžŲĮŠĆ╔ŽĄ─╗¼äėĪóĄ°Ą╣║═Ę┤ÅŚĪŻ
-
į┌Ī░BipedĪ▒ŠĒš╣Ö┌ųąŻ¼åóė├Ī░ūŃ█E─Ż╩ĮĪ▒ĪŻ
-
ėęµIå╬ō¶įōęĢ┐┌Ż¼╚╗║¾▀xō±Ī░Ū·ŠĆŠÄ▌ŗŲ„Ī▒ĪŻ
┤“ķ_Ī░▄ē█EęĢłDĪ▒ĪŻ
-
į┌Ī░▄ē█EęĢłDĪ▒▓╦å╬Ö┌ųąŻ¼▀xō±Ī░─Ż╩ĮĪ▒>Ī░özė░▒ĒĪ▒ĪŻ
¼Fį┌Ż¼ūŃ█EĻPµIļį┌Ī░▄ē█EęĢłDĪ▒ųąūāĄ├┐╔ęŖĪŻ

-
į┌Ī░▄ē█EęĢłDĪ▒ųąļpō¶Ą┌ 6 éĆūŃ█EĪŻ
į┌ęĢ┐┌ųąŻ¼Ą┌ 6 éĆūŃ█EĖ▀┴┴’@╩Š×ķ░ū╔½ĪŻ
-
į┌Ī░▄ē█EęĢłDĪ▒ųąŻ¼ęŲäėĄ┌ 6 éĆūŃ█E╩╣ų«ų▒Įė╬╗ė┌Ą┌ 7 éĆūŃ█EĄ─Ž┬├µĪŻ
┤╦▓┘ū„äōĮ©ę╗éĆūįė╔ą╬╩Įų▄Ų┌ĪŻ

į┌Ī░▄ē█EęĢłDĪ▒ųąĄ─ūŃ█E’@╩Š┴╦╩╝ļ║═─®Ä¼ĪŻį┌Ī░▄ē█EęĢłDĪ▒ųąęŲäėūŃ█EĄ─═¼Ģr▀@ą®Ä¼öĄļSų«Ė─ūāĪŻ
╠ß╩ŠŻ║ę▓┐╔ęį═©▀^╩╣ė├Ī░ūŃ█E─Ż╩ĮĪ▒ī”įÆ┐“ųąĄ─Ī░ūŃ█E▀ģŠē▀xō±Ī▒╝²Ņ^üĒĖ³Ė─ūŃ█EĄ─│ų└mĢrķgĪŻå╬ō¶ū¾╗“ėę╝²Ņ^üĒ▀xųąęŲäėĄ─▀ģŠēĪŻ▀xųą╝²Ņ^ų«ķgĄ─³c▀mĢrĄ─ęŲäėūŃ█EŻ¼Č°▓╗ė├Ė─ūā│ų└mĢrķgĪŻ
-
į┌Ī░▄ē█EęĢłDĪ▒ųąŻ¼ėęµIå╬ō¶Ī░ūŃ█E▄ē█EĪ▒Ą─╚╬ęŌ╬╗ų├ĪŻ
’@╩ŠĪ░Bip01 ūŃ█E─Ż╩ĮĪ▒ī”įÆ┐“ĪŻ
-
į┌┤╦ī”įÆ┐“ųąåóė├Ī░ŠÄ▌ŗūįė╔ą╬╩ĮĪ▒Ż©¤o╬’└Ēūā╗»Ż®ĪŻ
į┌Ī░▄ē█EęĢłDĪ▒ųąŻ¼ę╗éĆ┐šą─Ą─³S╔½║ąūė│÷¼Fį┌Ą┌ 5 éĆūŃ█EĄ─ėę▀ģĪŻ
-
å╬ō¶įō┐šą─³S╔½║ąūėĄ─ā╚▓┐ĪŻ
║ąūėūā│╔³S╔½Ą─╣╠¾wĪŻ▀@▒Ē╩Š╦³╩Ūę╗éĆūįė╔ą╬╩Įų▄Ų┌ĪŻ

-
╗¼äėĢrķg╗¼ēKŻ¼ė^┐┤äė«ŗĪŻ
įōā╔ūŃäė╬’Å─Ą┌ 5 éĆūŃ█EŲ»ĖĪĄĮĄ┌ 6 éĆūŃ█EĪŻ
Ė─ūā╗¼äėĄ─ĢrķgŻ║
╗¼äė░l╔·Ą├╠½┬²┴╦ĪŻ┐╔ęįĖ─ūā╗¼äėūŃ█EĄ─Ģrķg╩╣ūįė╔ą╬╩Įų▄Ų┌ķ_╩╝Ą├Ė³┐ņę╗ą®ĪŻČ°ŪęŻ¼╔Ē¾wį┌Ąž├µ╔Žą²▐D║═Ę┤ÅŚąĶę¬Ė³ČÓĄ─ĢrķgĪŻ
-
 å╬ō¶ 3ds Max ĀŅæBÖ┌╔ŽŻ¼Ģrķg┐žųŲŲ„ųąĄ─Ī░Ģrķg┼õų├Ī▒ĪŻ
å╬ō¶ 3ds Max ĀŅæBÖ┌╔ŽŻ¼Ģrķg┐žųŲŲ„ųąĄ─Ī░Ģrķg┼õų├Ī▒ĪŻ
-
į┌Ī░Ģrķg┼õų├Ī▒ī”įÆ┐“ųąŻ¼īóĪ░ĮY╩°ĢrķgĪ▒Å─ 123 Ė³Ė─×ķ 150Ż¼▓óå╬ō¶Ī░┤_Č©Ī▒ĪŻ
┤╦▓┘ū„═©▀^╠Ē╝ė┴╦ 27 éĆ┐š░ūļüĒöUš╣äė«ŗĪŻ
-
į┌Ī░Bip01 ūŃ█E─Ż╩ĮĪ▒ī”įÆ┐“ųąåóė├Ī░ŠÄ▌ŗūŃ█EĪ▒ĪŻ
╚ń╣¹ęčĮøĻPķ]┴╦įōī”įÆ┐“Ż¼┐╔ęįį┌Ī░▄ē█EęĢłDĪ▒-Ī░özė░▒ĒĪ▒ųąėęµI³cō¶īŹą─³S╔½ūįė╔ą╬╩Įų▄Ų┌ĪŻ
-
į┌Ī░▄ē█EęĢłDĪ▒ųąŻ¼═Žäėę╗éĆ▀xųąĄ─ķLĘĮą╬╩╣ų«ć·ūĪĄ┌ 6 ║═ Ą┌ 7 éĆūŃ█EĪŻ
-
īóĄ┌ 6 ║═Ą┌ 7 éĆūŃ█EęŲäėĄĮėę▀ģŻ¼▀@śė³S╔½ų▄Ų┌Ą├ĄĮöUš╣Ż¼Ą┌ 6 ║═Ą┌ 7 éĆūŃ█Eį┌╔į═ĒĄ─╬╗ų├ķ_╩╝Ż¼┤¾╝sį┌Ą┌ 140 ļĪŻ

-
į┌Ī░▄ē█EęĢłDĪ▒ųąŻ¼ūóęŌĄĮūŅ║¾ā╔éĆūŃ█EĄ─ĻPµI³cęčĮø│¼│÷┴╦äė«ŗĄ─ĮY╩°³cŻ¼öUš╣ĄĮ┴╦░ĄĄ─╗ę╔½ģ^ė“└’ĪŻ░┤Ž┬ ALT+R µIöUš╣äė«ŗĪŻ
¼Fį┌äė«ŗĄ─ĮY╬▓║═ūŃ█EĄ─ĮY╬▓ŽÓŲź┼õ┴╦ĪŻĢrķg╗¼ēK¼Fį┌’@╩Šäė«ŗęčĮøöUš╣ų┴ 158 ļŻ¼ūŃ█EĻPµI³cų«║¾Ą─▒│Š░ųąę▓ū„┴╦ŽÓæ¬Ė─äėĪŻ

╠ß╩ŠŻ║╚ń╣¹ Biped Ą─µI▒P┐ņĮ▌µI▓╗Ųū„ė├Ż¼åóė├į┌ų„╣żŠ▀Ö┌╔ŽĄ─Ī░µI▒P┐ņĮ▌µIĖ▓╔wŪąōQĪ▒ĪŻ
-
į┌Ī░▄ē█EęĢłDĪ▒ųąå╬ō¶Ą┌ 5 éĆūŃ█EĪŻ
-
į┌Ī░ūŃ█E─Ż╩ĮĪ▒ī”įÆ┐“ųąĄ─Ī░ūŃ█E▀ģŠē▀xō±Ī▒ĮMųąå╬ō¶ėę╝²Ņ^ĪŻ
į┌Ą┌ 5 éĆūŃ█E╔ŽĄ─║ąūėĄ─ėę▀ģ│÷¼Fę╗éĆ░ū╔½Ą─³cĪŻ

-
š{š¹ėę▀ģ╩╣ūŃ█Eį┌Ą┌ 83 ļĮY╩°ĪŻ┐╔─▄ąĶę¬Ę┼┤¾ęį▒Ń┐┤ĄĮļöĄĪŻ╩╣ė├Ī░▄ē█EęĢłDĪ▒ėęŽ┬ĮŪĄ─Ī░┐sĘ┼Ī▒░┤ŌoĪŻ

-
▓źĘ┼äė«ŗĪŻā╔ūŃäė╬’į┌ūŃ█E╔Ž╗¼äėĄ├Ė³┐ņ┴╦ĪŻ
╚ń╣¹╚į╠Äė┌Ī░ūŃ█E─Ż╩ĮĪ▒Ż¼ę▓┐╔ęįį┌ęĢ┐┌ųąęŲäėūŃ█EĄ─╬╗ų├ĪŻ
-
į┌Ī░═ĖęĢĪ▒ęĢ┐┌ųąŻ¼▀xųąĄ┌ 6 éĆūŃ█E▓óīó╦³ęŲų┴┼cĄ┌ 7 éĆūŃ█EŽÓÓÅĪŻ

-
ęŲäėĢrķg╗¼ēKüĒė^▓ņäė«ŗĪŻ
¼Fį┌ėąūŃē“Ą─Ģrķg║═┐šķgüĒäōĮ©Ą°Ą╣┴╦ĪŻ
įOų├Ą°Ą╣Ą─ĻPµIļŻ║
į┌▒Š▀^│╠ųąŻ¼īóĮ¹ė├Ī░äė┴”īW╗ņ║ŽĪ▒Ż¼į┌äė«ŗųą▓╗╩╣ė├ Biped ╬’└Ēūā╗»ĪŻę¬Č©┴x╦żĄ╣Ą─ĻPµIļŻ¼ę¬ą²▐Dā╔ūŃäė╬’Ą─ųžą─Ż¼╩╣ų«Å─┤╣ų▒ęŲäėūā×ķ╦«ŲĮęŲäėĪŻę▓┐╔ęį═©▀^ęŲäėųžą─╩╣ā╔ūŃäė╬’╔²Ų╚╗║¾╦żĄĮ╦«ŲĮ├µ╔ŽĪŻ
-
į┌Ī░Bip01 ūŃ█E─Ż╩ĮĪ▒ī”įÆ┐“ųąåóė├Ī░ŠÄ▌ŗūįė╔ą╬╩ĮĪ▒Ż©¤o╬’└Ēūā╗»Ż®ĪŻĻPķ]Ī░▄ē█EęĢłDĪ▒┤░┐┌ĪŻ
-
åóė├Ī░ūįäėĻPµI³cĪ▒ĪŻ
ī”ųžą─▓╗─▄╩╣ė├Ę┼ų├Īó╗¼äė╗“ūįė╔ĻPµI³cŻ¼ę“┤╦┐╔ęį╩╣ė├Ī░ūįäėĻPµI³cĪ▒üĒūįäėįOų├ĻPµI³cĪŻ
-
Į¹ė├Ī░ūŃ█E─Ż╩ĮĪ▒’@╩ŠŲõ╦¹ Biped ŠĒš╣Ö┌ĪŻ
-
 į┌Ī░▀xō±▄ē█EĪ▒ŠĒš╣Ö┌ųąŻ¼å╬ō¶Ī░▄|Ė╔┤╣ų▒Ī▒░┤ŌoĪŻ
į┌Ī░▀xō±▄ē█EĪ▒ŠĒš╣Ö┌ųąŻ¼å╬ō¶Ī░▄|Ė╔┤╣ų▒Ī▒░┤ŌoĪŻ
¼Fį┌┐╔ęįį┌▄ē█EÖ┌ųą┐┤ĄĮĻPµI³cĪŻ
-
ęŲäėĢrķg╗¼ēKĄĮĄ┌ 78 ļĪŻį┌Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌ųąå╬ō¶Ī░įOų├ĻPµI³cĪ▒ĪŻ
-
į┌Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌ųąš╣ķ_Ī░▄|Ė╔Ī▒Ö┌Ż¼╚╗║¾īóĪ░äė┴”īW╗ņ║ŽĪ▒Ė─×ķ 0ĪŻ
┤╦▓┘ū„Į¹ė├Ī░Biped äė┴”īWĪ▒▓ó┤·ų«ęįĪ░śėŠĆŚläė┴”īWĪ▒ĪŻĪ░Biped äė┴”īWĪ▒āHį┌Ī░▄|Ė╔┤╣ų▒Ī▒▄ē█EĻPµI³c╔Ž┐╔ė├Ż¼╦³┐╔ęįī”äė«ŗ╠Ē╝ė╬’└Ēūā╗»Č°Ī░śėŠĆŚläė┴”īWĪ▒▓╗┐╔ęįĪŻ
-
ęŲäėĄĮĄ┌ 83 ļĪŻ
ū¾─_į┌▀@ę╗ļėąę╗éĆ▓╚╠żĻPµI³cĪŻ
-
į┌įōęĢ┐┌ųąīóųžą─Ž“Ū░ęŲäėę╗³cĪŻ
-
īóųžą─╔į╬óą²▐DŻ©-15 Č╚Ż®╩╣ā╔ūŃäė╬’ķ_╩╝Ą°Ą╣ĪŻ

COM ęŲäė▓óį┌Ą┌ 83 ļą²▐D
-
▀xųą╦{╔½Ą──_ĪŻį┌Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌╔ŽŻ¼įOų├ę╗éĆ╗¼äėĻPµI³cĪŻ
-
ęŲäėĄĮĄ┌ 86 ļĪŻį┌Ī░▄ē█E▀xō±Ī▒ŠĒš╣Ö┌└’Ż¼åóė├Ī░▄|Ė╔ą²▐DĪ▒ĪŻ
-
į┌įōęĢ┐┌ųąŻ¼ą²▐Dųžą─╩╣ā╔ūŃäė╬’╠Äė┌╦«ŲĮ╬╗ų├ĪŻ

į┌Ą┌ 86 ļą²▐D
-
 ▀xųą▓óęŲäė├┐ę╗éĆ─_╩╣ų«╠¦Ų▓óĘųļxķ_ĪŻęŲäė├┐ę╗ų╗─_ų«║¾īó╦³ą²▐D╩╣ų«ųĖŽ“╔ŽĘĮŻ¼╚╗║¾å╬ō¶Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌└’Ą─Ī░įOų├ūįė╔ĻPµI³cĪ▒░┤ŌoĪŻ
▀xųą▓óęŲäė├┐ę╗éĆ─_╩╣ų«╠¦Ų▓óĘųļxķ_ĪŻęŲäė├┐ę╗ų╗─_ų«║¾īó╦³ą²▐D╩╣ų«ųĖŽ“╔ŽĘĮŻ¼╚╗║¾å╬ō¶Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌└’Ą─Ī░įOų├ūįė╔ĻPµI³cĪ▒░┤ŌoĪŻ
¤ošō║╬Ģrę¬į┌╩ų▓┐║═─_▓┐Č©┴xĻPµIļŻ¼▒M┴┐╩╣ė├Ī░įOų├ĻPµI³cĪ▒▀xĒŚČ°▓╗ę¬╩╣ė├Ī░ūįäėĻPµI³cĪ▒ĪŻ┤╦▓┘ū„╠Ē╝ė┐žųŲŲ„ĪŻ
-
▀xųą▓óęŲäė├┐ę╗ų╗╩ų▒█╩╣╦³Ą─╬╗ų├Å─╔Ē¾w╔Žļxķ_Ż¼╚╗║¾å╬ō¶Ī░įOų├ūįė╔ĻPµI³cĪ▒░┤ŌoĪŻ

Å─Ņ^ĒöŽ“Ž┬ė^┐┤ā╔ūŃäė╬’
Ž┬ę╗▓ĮŻ¼į┌ā╔ūŃäė╬’Ą─Ųõ╦³▓┐Ęųķ_╩╝Ž┬ĮĄų«║¾Ż¼╦³Ą──_▓┐ąĶę¬ėąę╗ļ╗“ā╔ļĄ─ö[äėĪŻ
-
ęŲų┴Ą┌ 88 ļĪŻīó├┐ų╗╩ų▒█║═─_Ž“╔ŽęŲäėę╗ą®ĪŻ═¼Ģrīó═╚▓┐║═╩ų▒█▀Mąąą²▐DĪŻīó─_▓┐ą²▐Dę╗³cŻ¼╩╣─_ų║ųĖŽ“╔ŽĘĮĪŻį┌ęŲäė║═ą²▐D═Ļ├┐éĆī”Ž¾ų«║¾į┘┤╬å╬ō¶Ī░įOų├ūįė╔ĻPµI³cĪ▒ĪŻ
┤╦▓┘ū„ī”äė«ŗ╠Ē╝ėę╗ą®Č■╝ē▀\äėĪŻ

-
ęŲäėĄĮĄ┌ 97 ļĪŻ
Ž┬ę╗▓ĮäōĮ©╦«ŲĮĄ─ā╔ūŃäė╬’Ž┬ĮĄų┴Ąž├µĪŻ
-
į┌Ī░▄ē█E▀xō±Ī▒ŠĒš╣Ö┌ųąåóė├Ī░▄|Ė╔┤╣ų▒Ī▒ĪŻį┌įōęĢ┐┌ųąŻ¼ęŲäėųžą─╩╣ā╔ūŃäė╬’┬õė┌Ąž├µĪŻ╩╣ė├Ī░ū¾Ī▒ęĢ┐┌üĒ╣└┴┐ĄžŲĮ├µŻ©┐╔▀xŻ¼┐╔ęį×ķ┤╦äōĮ©ę╗éĆ║ąūėŻ®ĪŻą²▐Dųžą─╩╣ā╔ūŃäė╬’į┘┤╬╦«ŲĮĪŻ

į┌Ī░ū¾Ī▒ęĢ┐┌ųąĄžŲĮ├µ╔ŽĄ─ā╔ūŃäė╬’
į┌╠Ä└Ē▀^│╠ųąŻ¼Ģ■ūóęŌĄĮŠG╔½Ą──_╩╝ĮKįćłDųĖŽ“Ąž├µĪŻ▀@╩Ūę“×ķĄ┌ 7 éĆūŃ█E╔ŽĄ─ĻPµI³cĄ─įOų├ĪŻŽ┬├µĢ■ą▐Å═╦³ĪŻ
-
▀xųąŠG╔½Ą──_▓ó░┤Ž┬ > µIüĒęŲäėų┴Ž┬ę╗ĻPµIļĪŻį┌Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌╔ŽŻ¼å╬ō¶Ī░įOų├ūįė╔ĻPµI³cĪ▒ĪŻī”Å─┤╦ļĄĮĄ┌ 158 ļ╦∙ėą╩ŻŽ┬Ą─ĻPµI³cųžÅ═┤╦▓┘ū„ĪŻ
-
╝mš²─Ūą®╚į╚╗║├Ž±ę¬├ōļx╬╗ų├Ą─Ą──_▓┐ą²▐DŻ¼▓óį┌╠Ä└ĒĄ─═¼Ģr×ķ╦¹éāįOų├ūįė╔ĻPµI³cĪŻ
-
į┌Ą┌ 97 ļŻ¼ī”─_▓┐▀MąąČ©╬╗╩╣╦³éāį┌Ąž├µ╔Ž│╔ę╗ŲĮ├µĪŻī”├┐ų╗─_å╬ō¶Ī░įOų├ūįė╔ĻPµI³cĪ▒ĪŻ═¼Ģrą²▐D╩ų▓┐╩╣╦³éāę▓╠Äė┌═¼ę╗ŲĮ├µŻ¼▓óį┘┤╬ī”╦³éāå╬ō¶Ī░įOų├ūįė╔ĻPµI³cĪ▒ĪŻ
-
╩╣ė├Ģrķg╗¼ēK×gė[ā╔ūŃäė╬’Ą─Ą°Ą╣▀\äėĪŻūóęŌĄĮā╔ūŃäė╬’į┌Ą°Ą╣ų«║¾─¦Ę©░ŃĄ─╔²ŲŻ╗į┌▒Ššn│╠Ą─╔į║¾▓┐ĘųĢ■ī”┤╦▀MąąĖ─äėĪŻ
Ž┬├µŻ¼īóŽ“╔Ē¾wųą╠Ē╝ėę╗éĆ▌p╬óĄ─Ę┤ÅŚĪŻ
╠Ē╝ėĘ┤ÅŚŻ║
īó╠Ē╝ėę╗éĆĻPµIļ╩╣ā╔ūŃäė╬’ū▓ō¶Ąž├µ▓óĘ┤ÅŚę╗┤╬ĪŻį┌Ą┌ 111 ļįOų├┴╦ę╗éĆĪ░▄|Ė╔┤╣ų▒ĻPµI³cĪ▒ąĶę¬▒╗ųžų├ĪŻ
-
į┌Ī░▄ē█E▀xō±Ī▒ŠĒš╣Ö┌ųąåóė├Ī░▄|Ė╔┤╣ų▒Ī▒ĪŻīóĢrķg╗¼ēKęŲų┴Ą┌ 111 ļĪŻ
-
į┌Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌ųąš╣ķ_Ī░IKĪ▒Ö┌Ż¼╚╗║¾īóĪ░äėæB╗ņ║ŽĪ▒Ė─×ķ 0ĪŻ
ūóęŌŻ║╚ń╣¹Ī░äėæB╗ņ║ŽĪ▒×ķ▓╗┐╔ė├Ż¼Ž╚å╬ō¶Ī░įOų├ĻPµI³cĪ▒ĪŻĪ░äėæB╗ņ║ŽĪ▒āHį┌įOų├┴╦Ī░▄|Ė╔┤╣ų▒ĻPµI³cĪ▒╠Ä▓┼┐╔ė├ĪŻ
-
ą²▐Dā╔ūŃäė╬’╩╣ų«╦«ŲĮĪŻ
-
īóā╔ūŃäė╬’Ž“║¾ęŲų┴Ąž╔ŽĪŻ
Ī░ūįäėĻPµI³cĪ▒╚į╠Äė┌ķ_åóĀŅæBŻ¼ę“┤╦┐╔ęį×ķ COM įOų├ĻPµI³cĪŻ
-
į┌Ą┌ 101 ļŻ¼į┌ųžą─╔ŽČ©┴xĻPµIļ╩╣ā╔ūŃäė╬’╔²ļxĄž├µĪŻ
ę▓┐╔ęį═©▀^į┌╩ų▓┐Ą─ĻPµIļųą╠Ē╝ėČ■╝ē▀\äėęįĖ·█Öųžą─Ą─▀\äėĪŻ
-
į┌ųžą─╔²ļxų«║¾Ą─ÄūļŻ¼╠¦Ų╩ų▓┐ĪŻ
-
į┌ųžą─ū▓ō¶Ąž├µų«║¾Ą─ÄūļųąŻ¼╩╣╩ų▓┐║═─_▓┐ū▓ō¶Ąž├µĪŻ┐╔ęį×ķ╩ų▓┐║═─_▓┐įOų├▓╚╠żĻPµI³cĪŻ
ų«║¾Ż¼×ķ╝╣ūĄįOų├ĻPµIļĪŻįōā╔ūŃäė╬’ų╗ėąā╔éĆ╝╣ūĄµ£ĮėŻ¼ę“┤╦▀@ĒŚ▓┘ū„║▄╚▌ęū▀MąąĪŻ
-
į┌Ą┌ 95 ļ║═Ą┌ 110 ļŻ¼ą²▐D╝╣ūĄ╩╣╝ń░“Įėė|Ąž├µĪŻ

╝╣ūĄą²▐D╩╣╝ń░“Įėė|Ąž├µ
ų«║¾Ż¼×ķŅ^▓┐įOų├ĻPµIļĪŻ
-
į┌Ą┌ 95 ļŻ¼ą²▐DŅ^▓┐╩╣Ž┬░═┐s▀MĪŻį┌Ą┌ 102 ļŻ¼į┘┤╬ą²▐D╩╣Ņ^▓┐Ž“║¾ōuäėĪŻ

ą²▐DŅ^▓┐
-
į┌Ą┌ 97 ļŻ¼į┌Ī░▀xō±▄ē█EĪ▒ŠĒš╣Ö┌ųąŻ¼åóė├Ī░▄|Ė╔ą²▐DĪ▒░┤ŌoĪŻ
-
į┌Ī░ĻPµI³cą┼ŽóĪ▒ŠĒš╣Ö┌ųąŻ¼š╣ķ_Ī░TCBĪ▒Ö┌ĪŻīóĪ░Åł┴”Ī▒║═Ī░▀B└mąįĪ▒Š∙Ė─×ķ 0ĪŻ
┤╦▓┘ū„╩╣Ę┤ÅŚõJ╗»▓ó’@╩Šį┌Ū·ŠĆłD▒ĒųąĪŻ

Ī░Åł┴”Ī▒║═Ī░▀B└mąįĪ▒×ķ┴Ń
╠ß╩ŠŻ║╚ń╣¹Ī░Åł┴”Ī▒║═Ī░▀B└mąįĪ▒Ū·ŠĆ▓╗┐╔ė├Ż¼å╬ō¶Ī░╔Žę╗ĻPµI³cĪ▒╚╗║¾å╬ō¶Ī░Ž┬ę╗ĻPµI³cĪ▒ĘĄ╗ž┤╦ĻPµIļ╩╣Ū·ŠĆĄ├ĄĮ’@╩ŠĪŻ
-
▓źĘ┼äė«ŗĪŻ
įōā╔ūŃäė╬’Ą─Ę┤ÅŚą¦╣¹Ė³╝ėŪÕ│■ĪŻ
-
╚ń╣¹ąĶę¬īóā╔ūŃäė╬’╦∙│┴╚ļĄž░ÕųąĄ─╚╬ęŌ▓┐Ęų╔²ŲŻ¼į┌╗¼äėģ^ė“Ą─Ž┬ĘĮäōĮ©ę╗éĆ║ąūė▓ó└¹ė├╦³üĒ▀Mąą╣└┴┐ĪŻ╚ń╣¹Į¹ė├┴╦Ī░ŠĆ┐“Ī▒ęĢ┐┌ų°╔½Ż¼īó┐╔ęį╩╣ā╔ūŃäė╬’┼c║ąūėų«ķgĄ─Į╗▓µ³cĖ³ŪÕ╬·Ą─┐╔ęĢ╗»ĪŻ

-
īó╣żū„▒Ż┤µ×ķ myslip.bipĪŻīó╣żū„┼c slip_with box.bip ▀Mąą▒╚▌^ĪŻ
š²╚ńų«Ū░ūóęŌųą╦∙╠ߥĮĄ─Ż¼įōā╔ūŃäė╬’į┌äė«ŗĮY╩°ĢrŲµ█E░ŃĄ─Ž“║¾šŠŲĪŻ▀@╩ŪūŅ║¾ūŃ█EĄ─ĮY╣¹3ds Max į╩įSį┌ūŃ█E║═ūįė╔ą╬╩ĮĄ──Ż╩Įų«ķgüĒ╗žŪąōQŻ¼ę“┤╦┐╔ęį═©▀^į┌äė«ŗ─Ż╩Įų«ķg▐DōQüĒ╝mš²╦³ĪŻ
ūŃ█E║═ūįė╔ą╬╩Įų«ķgĄ─▐DōQŻ║
┐╔ęįį┌ūŃ█E║═ūįė╔ą╬╩ĮĄ──Ż╩Įų«ķg▐DōQŻ¼▀@śė▓╗Ģ■ī”▀\äėĦüĒ╚╬║╬ōp╩¦ĪŻ¤ošō╩ŪÅ─ūŃ█E▐DōQ│╔ūįė╔ą╬╩Į╗“╩ŪÅ─ūįė╔ą╬╩Į▐DōQ│╔ūŃ█EŻ¼▀\äėČ╝▒Ż│ų▓╗ūāŻ©┤µį┌ę╗ą®ŠųŽ▐ąįŻ®ĪŻ
-
└^└m«öŪ░╬─╝■╗“┤“ķ_ slip_convert_start.maxĪŻ
-
åóė├Ī░ūįäėĻPµI³cĪ▒ĪŻ
-
į┌ęĢ┐┌ųą▀xųąįōā╔ūŃäė╬’╔Ē¾wųąĄ─╚╬ę╗▓┐ĘųĪŻ
-
į┌Ī░▀\äėĪ▒├µ░Õ╔ŽĄ─Ī░▀xō±▄ē█EĪ▒ŠĒš╣Ö┌ųąŻ¼å╬ō¶Ī░▄|Ė╔╦«ŲĮĪ▒ĪóĪ░▄|Ė╔┤╣ų▒Ī▒╗“Ī░▄|Ė╔ą²▐DĪ▒ųąĄ─╚╬ęŌę╗éĆĪŻ
-
 į┌Ī░BipedĪ▒ŠĒš╣Ö┌ųąŻ¼▀xō±Ī░▐D╗»Ī▒ĪŻ
į┌Ī░BipedĪ▒ŠĒš╣Ö┌ųąŻ¼▀xō±Ī░▐D╗»Ī▒ĪŻ
-
į┌Ī░▐D╗»×ķūįė╔ą╬╩ĮĪ▒ī”įÆ┐“ųąŻ¼å╬ō¶Ī░┤_Č©Ī▒ĪŻ▓╗ę¬åóė├Ī░├┐ļ╔·│╔ę╗éĆĻPµIļĪ▒ĪŻ
ūŃ█EÅ─ęĢ┐┌ųąŽ¹╩¦┴╦Ż¼Ą½╩Ūäė«ŗ┼cų«Ū░Ą─ę╗śėĪŻ
Ž┬├µŻ¼äh│²╬╗ė┌ā╔ūŃäė╬’╔²Ų▓óĘĄ╗žĄĮšŠų°Ą─╬╗ų├Ą─ĻPµI³cĪŻ
-
į┌Ą┌ 111 ļŻ¼▀xųąš¹éĆā╔ūŃäė╬’ĪŻ
-
į┌▄ē█EÖ┌ųąŻ¼▀xųąĄ┌ 111 ļų«║¾Ą─╦∙ėąĻPµI³cĪŻ

-
äh│²╦∙ėą▀xųąĄ─ĻPµI³cĪŻ
¼Fį┌▓źĘ┼äė«ŗĪŻā╔ūŃäė╬’ąąū▀▓ó║▄┐ņ╗¼äė╚╗║¾═Ļ╚½ņoų╣Ą─╠╔Ą╣ĪŻ
Ė³Ė─ėŗĢrŻ║
-
 ┤_▒ŻĪ░ūįäėĻPµI³cĪ▒╚į▒Ż│ųåóė├ĀŅæBĪŻ
┤_▒ŻĪ░ūįäėĻPµI³cĪ▒╚į▒Ż│ųåóė├ĀŅæBĪŻ
-
▀xō±š¹éĆā╔ūŃäė╬’ĪŻ
-
į┌▄ē█EÖ┌ųąŻ¼═Žäėę╗éĆ▀xō±┐“▓ó▀xųąÅ─Ą┌ 86 ļĄĮäė«ŗĮY╩°▓┐Ęų╦∙ėąĄ─ĻPµI³cĪŻ
-
īóĢrķg╗¼ēKęŲų┴Ą┌ 90 ļĪŻ
-
īó╦∙ėąĄ─ĻPµI³cŽ“Ž┬╗¼äėŻ¼╩╣Ą┌ 86 ļ╔ŽĄ─ĻPµI³c¼Fį┌╬╗ė┌Ą┌ 90 ļĪŻ
╠ß╩ŠŻ║ę¬īóę╗éĆĻPµIļęŲų┴ę╗éĆŠ½┤_╬╗ų├Ż¼Ž╚ę¬▀xųąĻPµI³cĪŻ╚╗║¾īóĢrķg╗¼ēKęŲų┴Ų┌═¹Ą─╬╗ų├ų«║¾ęŲäėĻPµI³cĪŻ
╠ß╩ŠŻ║¼Fį┌Ą°Ą╣│ų└mĄ─Ģrķgėą³cķLĪŻ
╠ß╩ŠŻ║╚ń╣¹įĖęŌĄ─įÆ┐╔ęįį┌Ą┌ 115 ļų«║¾ī”Ņ^▓┐╠Ē╝ėĖ³ČÓĄ─ą²▐DĪŻ┐╔ęį╩╣ā╔ūŃäė╬’╠╔į┌Ąž├µ╔ŽĢrŻ¼Ņ^▓┐«a╔·ę╔æ]Ą─ōuäėĪŻę▓┐╔ęįćLįćī”─_▓ĮĄ─╝ÜąĪ▀\äėČ©┴xĻPµIļŻ¼īó─_▓┐ŲĮĘ┼ė┌Ąž├µ▓ó╩╣╦¹éāŽ“╣Ū┼Ķ ╗¼äė═¼Ģr╠¦ŲŽź╔wĪŻį┌╩ų▓┐║═─_▓┐įOų├▓╚╠żĻPµI³cŻ¼╚╗║¾ą²▐D COM īŹ¼Fę╗éĆ║▄ėą╚żĄ─ą¦╣¹ĪŻ
-
īó╣żū„▒Ż┤µ×ķ myslip.maxŻ¼╗“╝ė▌d slip_final.bip üĒ▓ķ┐┤ą¦╣¹ĪŻ
(ž¤╚╬ŠÄ▌ŗŻ║admin)

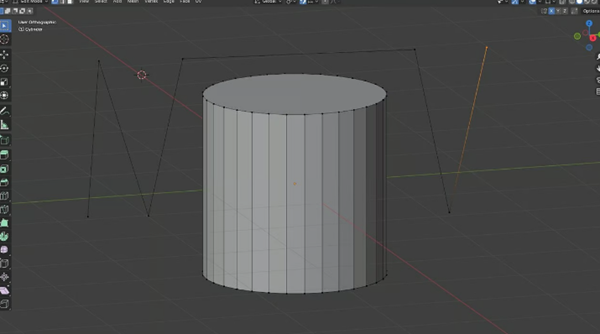 3DĮ©─Ż▄ø╝■BlenderŻ║╚ń║╬
3DĮ©─Ż▄ø╝■BlenderŻ║╚ń║╬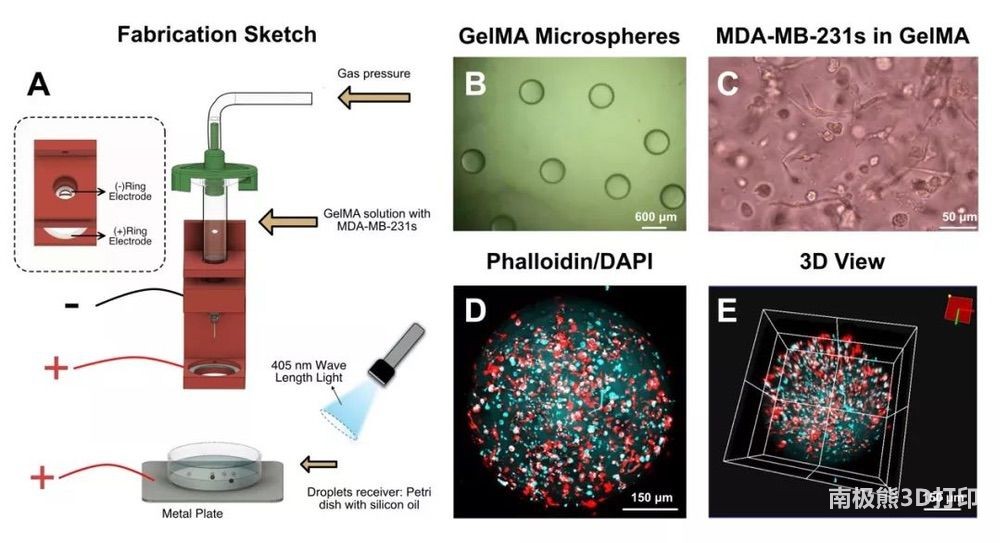 ╝ū╗∙▒¹Ž®╦߶¹╗»├„─zŻ©GelM
╝ū╗∙▒¹Ž®╦߶¹╗»├„─zŻ©GelM Ēö┐»ŠC╩÷Ż║3D┤“ėĪēK¾wĮī┘
Ēö┐»ŠC╩÷Ż║3D┤“ėĪēK¾wĮī┘ ▓╩╔½╦«╣P+3D┤“ėĪŻ¼┤¾╔±Į╠
▓╩╔½╦«╣P+3D┤“ėĪŻ¼┤¾╔±Į╠ ╚ń║╬ė├3D┤“ėĪÖCųŲū„¤¶šųŻ┐
╚ń║╬ė├3D┤“ėĪÖCųŲū„¤¶šųŻ┐ MagicsĘųĖŅ─Żą═Ą─3ĘN▓╗═¼
MagicsĘųĖŅ─Żą═Ą─3ĘN▓╗═¼- Īż 3DĮ©─Ż▄ø╝■BlenderŻ║╚ń║╬╠Ē╝ėĒö³cŻ┐
- Īż╝ū╗∙▒¹Ž®╦߶¹╗»├„─zŻ©GelMAŻ®╔·╬’3D┤“
- ĪżĒö┐»ŠC╩÷Ż║3D┤“ėĪēK¾wĮī┘▓Ż┴¦Ż©1Ż®
- Īż▓╩╔½╦«╣P+3D┤“ėĪŻ¼┤¾╔±Į╠─Ń╚ń║╬ė├╚ļķT
- Īż╚ń║╬ė├3D┤“ėĪÖCųŲū„¤¶šųŻ┐▀@éĆĮ╠│╠šł╩š
- ĪżMagicsĘųĖŅ─Żą═Ą─3ĘN▓╗═¼ĘĮ╩ĮĪżŽ┬
- ĪżMagicsĘųĖŅ─Żą═Ą─3ĘN▓╗═¼ĘĮ╩ĮĪż╔Ž
- Īż3D┤“ėĪÖCĮ╠│╠Ż║ūįųŲ╦▄┴ŽńPĄČ
- Īż3D┤“ėĪÖCĮ╠│╠Ż║Ender-3 ╚ń║╬╔²╝ēĮī┘öD
- Īż3D┤“ėĪĮ╠│╠Ż║ķT░č╩ųųŲū„ äōŽļ╚²ŠS
 MagicsĘųĖŅ─Żą═Ą─
MagicsĘųĖŅ─Żą═Ą─ ╚÷┴_ØMŻ║3D┤“ėĪ╣Ō
╚÷┴_ØMŻ║3D┤“ėĪ╣Ō 3D┤“ėĪÖCą┬╩ųĮ╠│╠
3D┤“ėĪÖCą┬╩ųĮ╠│╠ äōŽļšn╠├Ż║Į╠─Ńė├
äōŽļšn╠├Ż║Į╠─Ńė├ 3D┤“ėĪĮ╠│╠Ż║▓╗Ą±
3D┤“ėĪĮ╠│╠Ż║▓╗Ą±- Īż╩Ę╔ŽūŅÅŖ3D┤“ėĪ╣P╩╣ė├Į╠│╠Ż║ČÓśė═µĘ©Ż¼
- Īżą┬╩ų╚ń║╬═µ▐D3D┤“ėĪÖCŻ┐
- Īż┤¾╔±Į╠─Ń╚ń║╬3D┤“ėĪė╬æ“╚╦╬’─Żą═
- ĪżCinema 4D▄ø╝■Į©┴ó3d┤“ėĪ─Żą═Ą─9ŚlĮ©ūh
- Īż╩ų░č╩ųĮ╠─Ń╚ń║╬3D┤“ėĪę╗éĆĪŠ▒ŲšµĪ┐Ą─╔n
- Īż3DĮ©─Ż│Żė├▄ø╝■ėą──ą®Ż┐3DĮ©─ŻĄ─│Żė├▄ø
- Īżīóūį╝║Ą─ššŲ¼3D┤“ėĪ│÷üĒŻ¼įŁüĒų╗ąĶ▀@╚²
- Īż3D┤“ėĪ╣P╩╣ė├Į╠│╠Ż║Į╠─Ń╚ń║╬«ŗę╗ų╗ąĪ³S
- ĪżūŅ║├ė├Ą─ŪąŲ¼▄ø╝■SimplifyĮ╠│╠Ż©ę╗Ż®
- Īż│§īWMESHMIXER│§╝ēĮ╠│╠


