�����˹������o�����켼�g���F��ܲ��ϵ�3D��ӡ
�r�g��2024-08-14 08:51 ��Դ��EFL����3D��ӡ�c�������� ���ߣ�admin ��x����
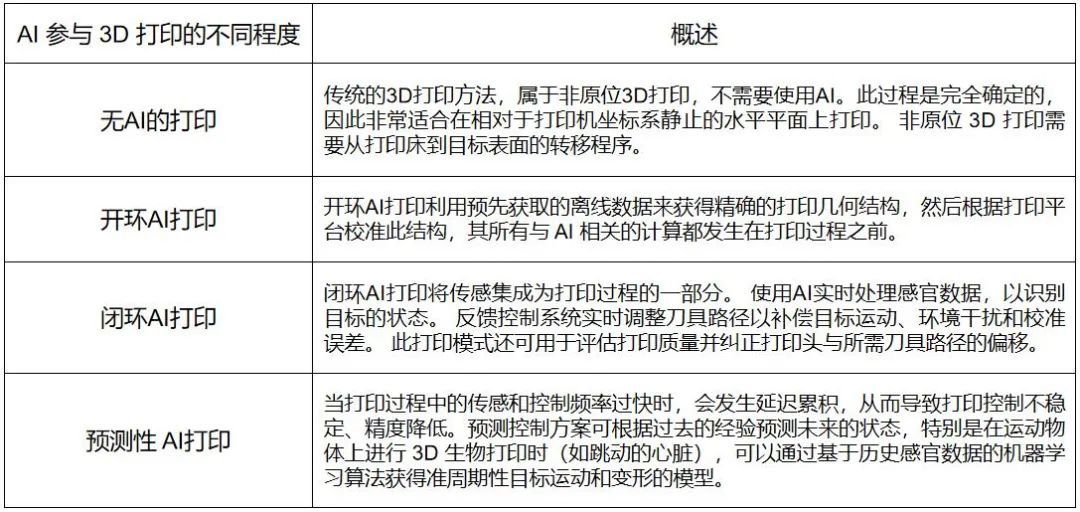
Ŀǰ���Ի��Ŀɴ����O������ͨ�^��ԭλ��ӡ����ģ�ԓ����Ҫ����ƽ��������M�д�ӡ���S�����D�Ƶ�Ŀ�˱����ϣ����@�N�������܌��´�ӡ�Y����Ŀ�˱���o���ڄӑB��r���Fƥ�䡣ԭλ��ӡ��ֱ����Ŀ�˱����ϴ�ӡ3D�����ṩ��һ�N���ڵĽ�Q������ԓ������Ҫ�˹����ܣ�AI���Ď�������֪���m�����A�y��ӡ�h���Ġ�B��
����University of Minnesota��Michael C. McAlpine��Hyun Soo Park������Nature Reviews Materials�s־�ϰl�����}�顰3D-printed multifunctional materials enabled by artificial-intelligence-assisted fabrication technologies���ľC�����¡����½�B������ԭλ3D��ӡ����Ӳ��Ϻ�����īˮ�������_�h���]�h���A�y���Ƶ��˹�����3D��ӡ�������Լ����g�C���˺��˹���������c3D��ӡ��������ɡ�����˹����ܡ�3D��ӡ�����ܲ��Ϻ͂��Ի������t�W�O����ں��M����չ����
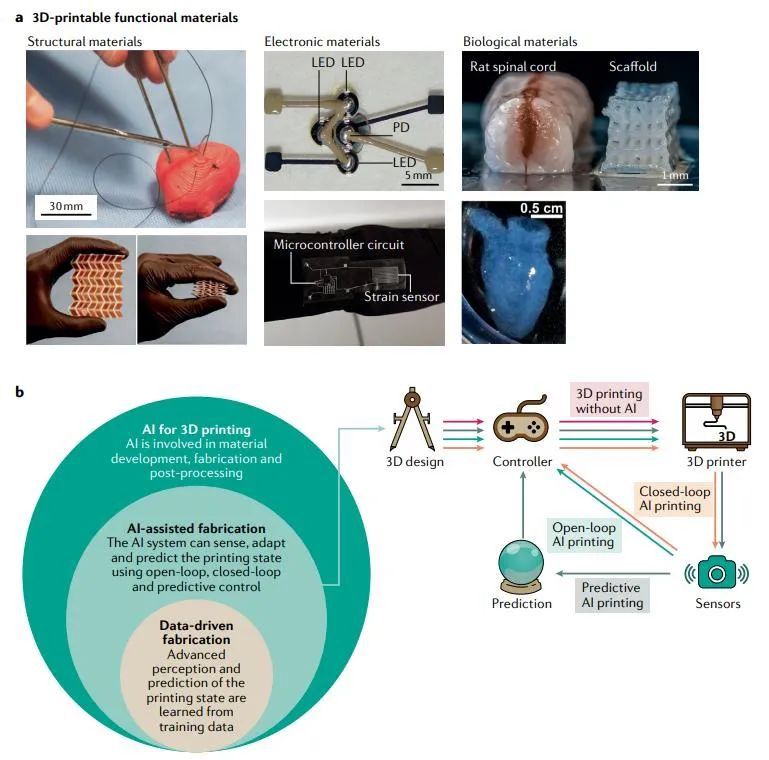
���˛]��AI�Ă��y3D��ӡϵ�y֮�⣬����AI���c��ӡ������������e�Ɍ���ӡ�֞飺�_�hAI���]�hAI���A�y��AI���N��
1. ����ԭλ3D��ӡ�Ĺ�����īˮ
3D��ӡ������Ҫ�c������3D��ӡ�������ݣ��@Щ����ͨ���֞���ڹ�̻��Ļ���ڔD��ʽ��ӡ�ģ����ڹ�̻��Ĵ�ӡ����ͨ����Ҫ��ӡ���Ͼ��пɹ�̻��������������ڔD��ʽ�Ĵ�ӡ������Ҫ��ӡ���Ͼ���һ�������Լ�����׃ϡ���ԣ��Ķ����ڔD���^�̵Č��F��
1.1 ��Ӳ���
��������O��ԭλ3D��ӡ�IJ�����Ҫ�M����С��ӵȹ��������늚����ԣ�����Ҫ�����cĿ�����������ƥ��ęCе���ܡ���׃���ԡ�ʹ�ßo�C����Ӳ�IJ��ϕr������{�������ijߴ����m�����ڔD���Ĵ�ӡ��ͨ����ͨ�^���@Щ���Ϸ���ɼ{���w���팍�F�ġ�
1.2 ˮ���z
ˮ���z�����ڽM�����̺�������ӑ��ã����������Ȼ��������|���ɞ鼚���ṩ���m�����B�h����ͨ�^��׃ˮ���z�ۺ���W�j�Ŀ�϶�ʺ�ճ�ȿɌ��䏊�Ⱥ�ճ�����M���{����ͨ�^���ӹ����l������׃���Ԅ��Ɍ����ӡ���M�Ѓ�����ˮ���z�����ڽM�������M��ԭλ3D��ӡ���죬�Ķ������t���ܷ℩��ճ�τ�ֲ����Ϳɴ����O��ȷ��档
2. �_�h�˹�����3D��ӡ
�_�h�˹�����3D��ӡ��Ҫ�������_ʼ֮ǰ�@ȡ���P��ӡ�Y��������Π����Ϣ��AIʹ�ôˎ���Ϣ���_������·���OӋ�Ͳ��Ϸֲ���ᘌ���ͬ��ӡ�Y�����Π�@�Ă��з������¡�
2.1 �ڷ�ƽ��������M��3D��ӡ
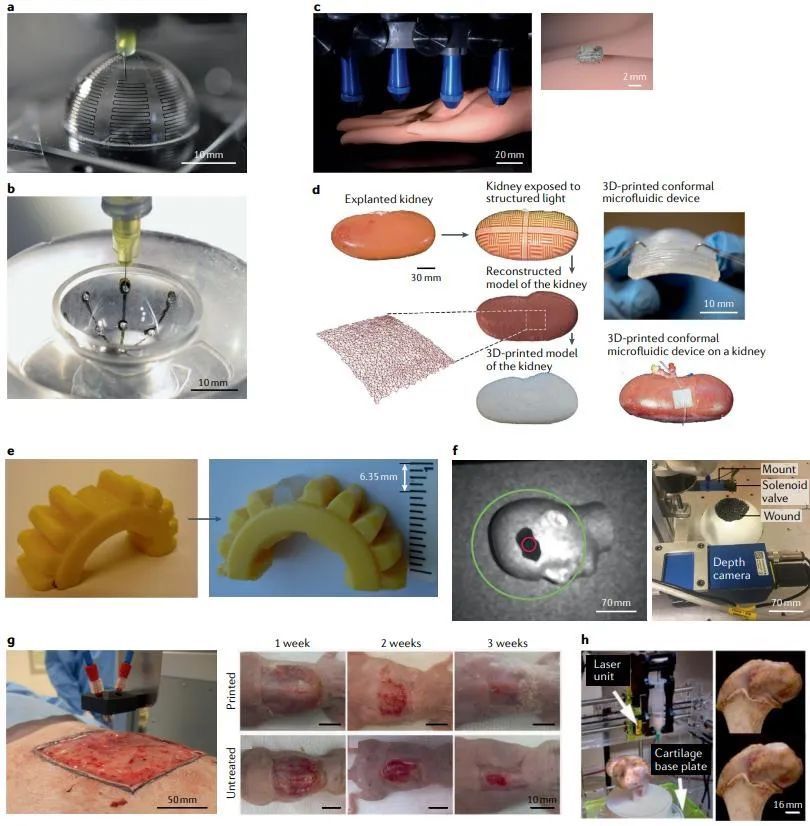
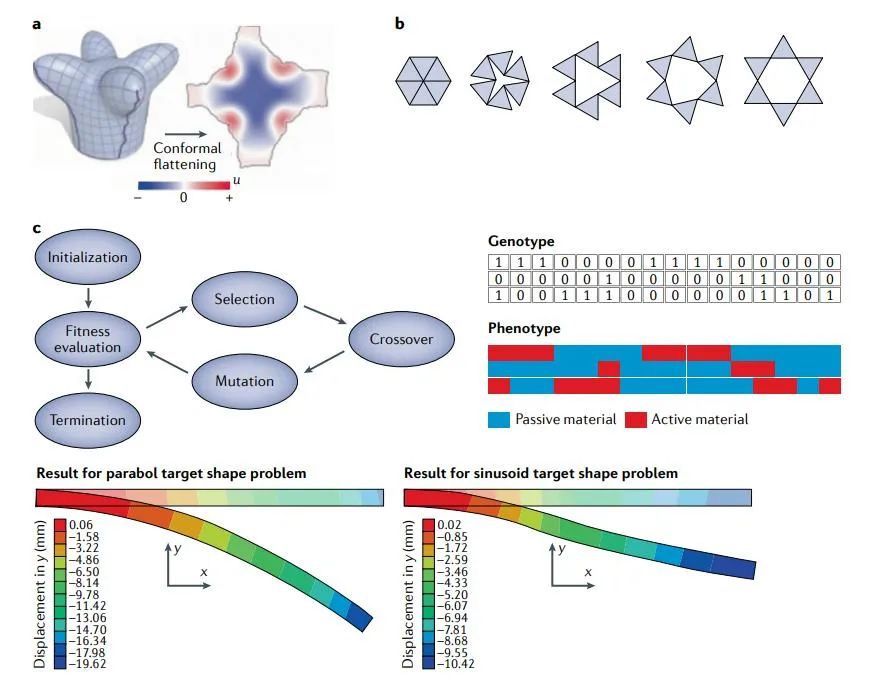
�����_�h�˹�����3D��ӡ���ԣ������ڷ�ƽ������ό��Fֱ�Ӵ�ӡ��AI����ڴ�ӡ֮ǰ�@ȡĿ�˵Ď���Ϣ�����ھ��и����s���Π�ı��棬��Ҫ����3D���蹤�߲����㷨�o�����M���ܼ����c�Ɣ���3D�ؽ������t�W�����У�Ŀ�˱����3D��Ϣ��Դ�ǴŹ�������CT������t�W������
2.2 ����Ŀ�ˎνY�����Π��
ͨ�^�\���Π�̿�ʹ��������ܵIJ������ض��̼��£��ضȡ��x�ӝ�ȡ��Cеؓ�d�����FҎ�����Π�׃��������Ŀ�ˎνY�����Π�̳����ڿɴ����t��ֲ��������죬�����ֱ��3D��ӡ�����w�ϣ����M���R���\����M�Ђ����ޏ͡�
3. �]�h�˹�����3D��ӡ
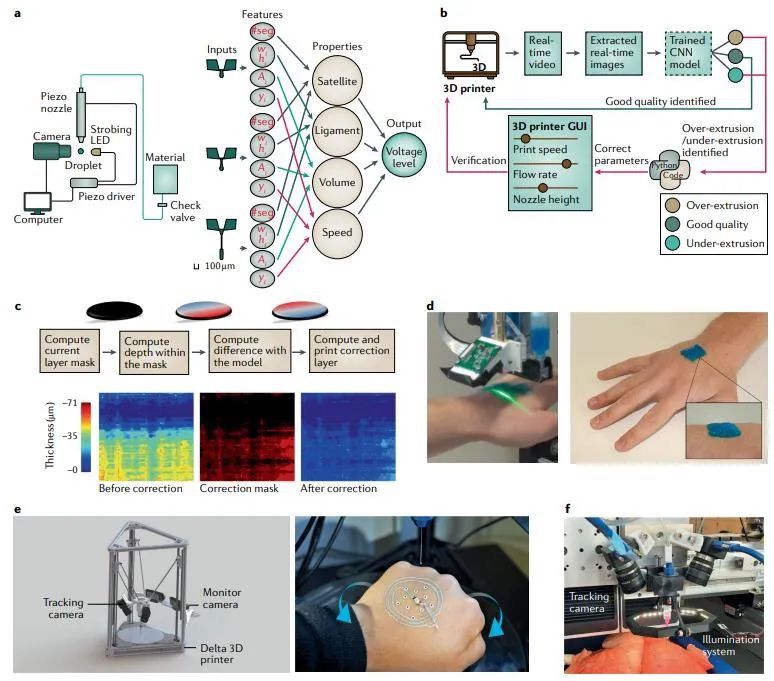
�]�hAI��ӡ��ָ���r�m����ӡ�h��׃����3D��ӡ����������ڙz�y����ۙ���R�e�㷨�������ڴ�ӡ�^���Ќ��r�����\�Ӡ�B����ӡ�ӵı���Y���ʹ�ӡ�^�ĔD����B���]�h�˹�����3D��ӡ��Ҫ�Ɍ��F�ɴ��ܣ�ͨ�^�ھ�У����ߴ�ӡ�|����ͨ�^�ھ���ۙ���F�Ƅ�Ŀ���ϵ�ԭλ��ӡ��
3.1 ��ߴ�ӡ�|��
���]�h3D��ӡ�У����N������ͨ�^�c3D��ӡƽ�_�M�м��ɣ��܉��^����Ϻʹ�ӡ�Y���Ġ�B�����Д�����������Ӌ��Cҕ�X�͙C���W���㷨��Ӌ�㹤���У��M���R�e��ӡȱ�ݣ���������M�o���\�ӿ���ϵ�y�ṩ�������Լm����ӡ�г��F���e�`��
3.2 ���Ƅ�Ŀ�����M��3D��ӡ
���w�е�Ƥ�w��ܛ���ٶ����S�r�g��׃�����l������׃�Q�ͷDŽ���׃�Σ���������������Ҫ���F���@Щ�ӑB׃���Y���ϵ�ԭλ��ӡ����Ҫ���r�����Д������{����ӡ·����
3.3 �C���˸�֪���g�o��ԭλ3D��ӡ
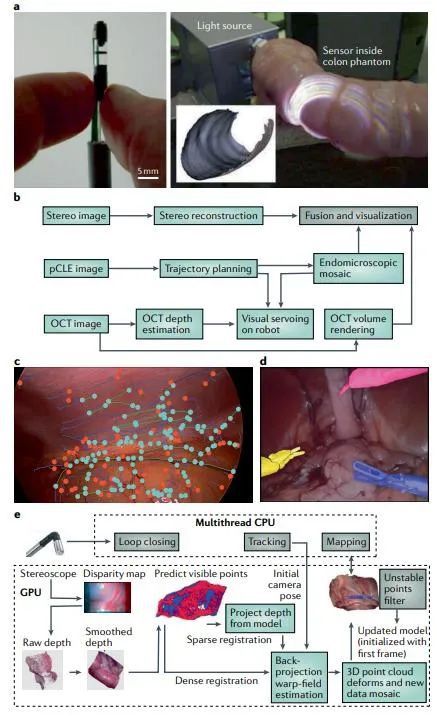
���ÙC���˸�֪���gĿ���Ǟ����R�e���ٽM���Ďκ͙Cе���ԣ��Լ��ӑBϵ�y�еĸɔ_�Ͳ��_���ԡ��ͼ���֪��������ҕ�X��֪�������ó���ϵ�y�͈D��̎���㷨��z�yҕ�X���������M��3D�ؽ�������֪����ڴ��X����ϵ�y��֪�X����3D��ӡ������ͼ���֪�ؘ���3D�����������ں��m����·��Ҏ����
4. �A�y���˹������o��3D��ӡ
�ڻ��w�������M��3D��ӡ��������Ҫ�ܵ����С����ƺ�Ӌ�����t�����ơ���ӡ�^����Ҫ���M�������׃������푑�����t���ܕ�������е��ײ���M�����Ķ�Ӱ푴�ӡ�|�����p���M�����@��Ҫ�A�y���˹��������˽⮔ǰ��B��ͬ�r��߀���Ը����^ȥ�Ľ���A�yδ����B���A�y�܇��M����δ��׃�β�Ҏ��δ�����������Ч�p�ٻ�������ӡ�e�`��
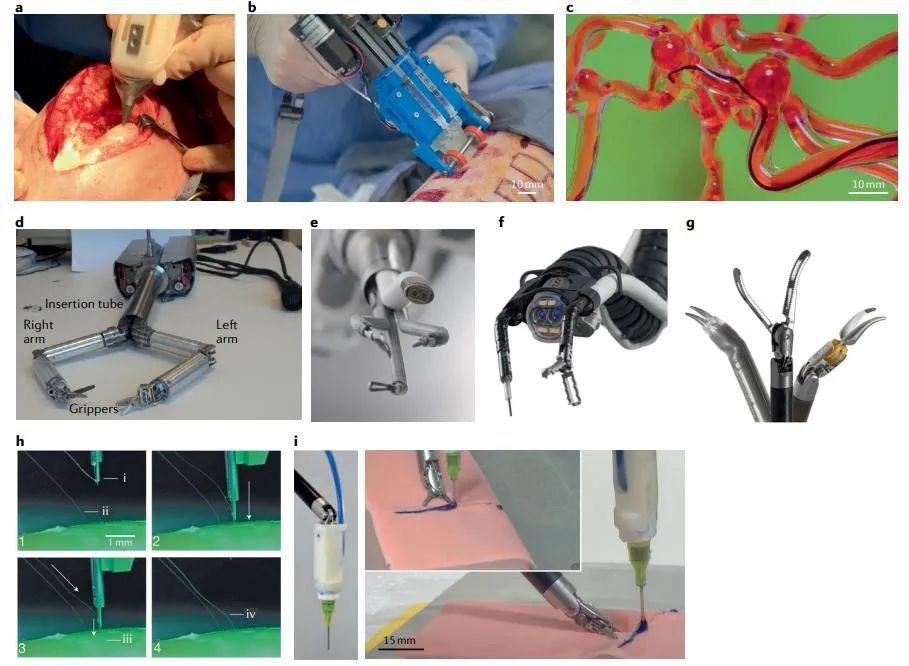
5. ���g�C���ˌ��Fԭλ3D��ӡ
���t�W�I�����g�C����ԭλ3D��ӡ�Ɍ���������늡����W�����﹦�ܵ��������ֱ��ݔ�͵����w֮�У��Ķ��Զ�N��ʽ�o���F���t�W�ί����@Щ�������M���к;��_�\�ӿ������������g�C���˿��Ԍ��F�������ܡ������g���Ԝp�����t���e�`��ɵ������������
�����˹������o�����켼�g�M�е�3D��ӡ�ڿɴ����O���ֲ��������췽����о�ĝ���������AI���g������3D��ӡ֮����̎�����A�Σ�Ŀǰ��Ȼȱ��3D��ӡ�C���˺��Ñ�֮�g�����ܽ������档չ��δ���������F����̓�M�F���ȼ��g��3D��ӡ�ĽY�ό���ʹ�˹����܌��Fȫ�̵Ĵ�ӡָ���������˹������M���o������Ҳ���ɞ��~��3D��ӡ�ռ�������Ҫ;����
�����īI
Zhu, Z., Ng, D.W.H., Park, H.S. et al. 3D-printed multifunctional materials enabled by artificial-intelligence-assisted fabrication technologies. Nat Rev Mater 6, 27�C47 (2021)
https://doi.org/10.1038/s41578-020-00235-2
����University of Minnesota��Michael C. McAlpine��Hyun Soo Park������Nature Reviews Materials�s־�ϰl�����}�顰3D-printed multifunctional materials enabled by artificial-intelligence-assisted fabrication technologies���ľC�����¡����½�B������ԭλ3D��ӡ����Ӳ��Ϻ�����īˮ�������_�h���]�h���A�y���Ƶ��˹�����3D��ӡ�������Լ����g�C���˺��˹���������c3D��ӡ��������ɡ�����˹����ܡ�3D��ӡ�����ܲ��Ϻ͂��Ի������t�W�O����ں��M����չ����
�D1 AI�o�����켼�g���F��ܲ��ϵ�3D��ӡ����
���˛]��AI�Ă��y3D��ӡϵ�y֮�⣬����AI���c��ӡ������������e�Ɍ���ӡ�֞飺�_�hAI���]�hAI���A�y��AI���N��
��1 ��ͬ�̶�AI���c��3D��ӡ����
1. ����ԭλ3D��ӡ�Ĺ�����īˮ
3D��ӡ������Ҫ�c������3D��ӡ�������ݣ��@Щ����ͨ���֞���ڹ�̻��Ļ���ڔD��ʽ��ӡ�ģ����ڹ�̻��Ĵ�ӡ����ͨ����Ҫ��ӡ���Ͼ��пɹ�̻��������������ڔD��ʽ�Ĵ�ӡ������Ҫ��ӡ���Ͼ���һ�������Լ�����׃ϡ���ԣ��Ķ����ڔD���^�̵Č��F��
�D2 ������īˮ��ԭλ3D��ӡ
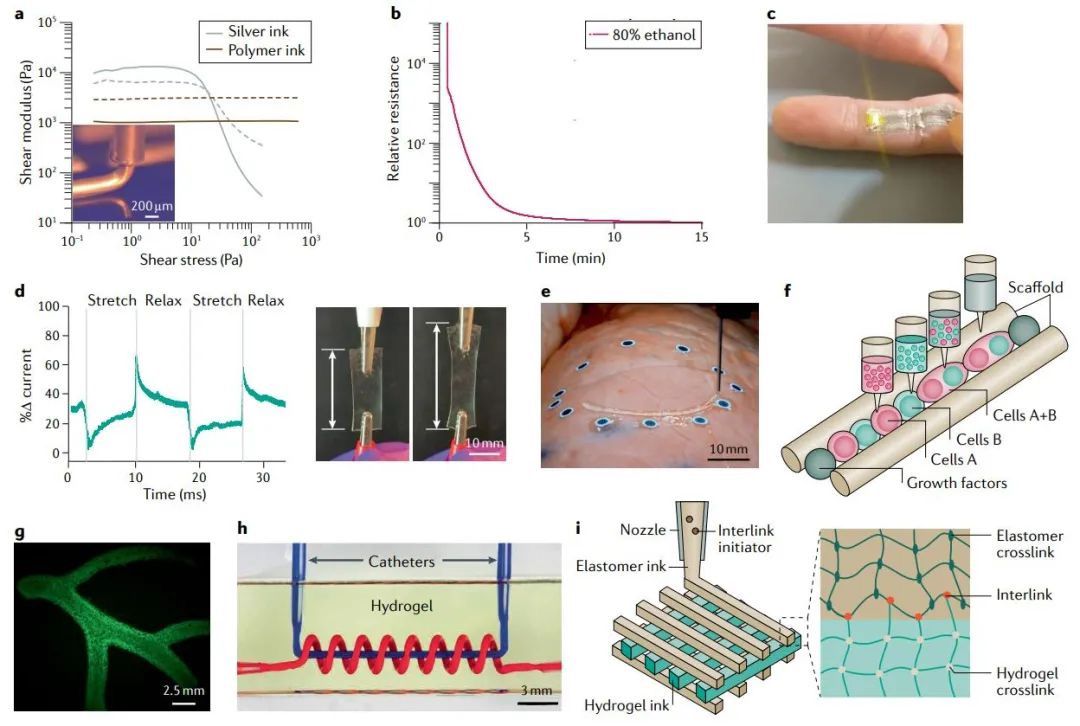
1.1 ��Ӳ���
��������O��ԭλ3D��ӡ�IJ�����Ҫ�M����С��ӵȹ��������늚����ԣ�����Ҫ�����cĿ�����������ƥ��ęCе���ܡ���׃���ԡ�ʹ�ßo�C����Ӳ�IJ��ϕr������{�������ijߴ����m�����ڔD���Ĵ�ӡ��ͨ����ͨ�^���@Щ���Ϸ���ɼ{���w���팍�F�ġ�
1.2 ˮ���z
ˮ���z�����ڽM�����̺�������ӑ��ã����������Ȼ��������|���ɞ鼚���ṩ���m�����B�h����ͨ�^��׃ˮ���z�ۺ���W�j�Ŀ�϶�ʺ�ճ�ȿɌ��䏊�Ⱥ�ճ�����M���{����ͨ�^���ӹ����l������׃���Ԅ��Ɍ����ӡ���M�Ѓ�����ˮ���z�����ڽM�������M��ԭλ3D��ӡ���죬�Ķ������t���ܷ℩��ճ�τ�ֲ����Ϳɴ����O��ȷ��档
2. �_�h�˹�����3D��ӡ
�_�h�˹�����3D��ӡ��Ҫ�������_ʼ֮ǰ�@ȡ���P��ӡ�Y��������Π����Ϣ��AIʹ�ôˎ���Ϣ���_������·���OӋ�Ͳ��Ϸֲ���ᘌ���ͬ��ӡ�Y�����Π�@�Ă��з������¡�
��2 3D��ӡ���o�����еij�Ҋ����
2.1 �ڷ�ƽ��������M��3D��ӡ
�����_�h�˹�����3D��ӡ���ԣ������ڷ�ƽ������ό��Fֱ�Ӵ�ӡ��AI����ڴ�ӡ֮ǰ�@ȡĿ�˵Ď���Ϣ�����ھ��и����s���Π�ı��棬��Ҫ����3D���蹤�߲����㷨�o�����M���ܼ����c�Ɣ���3D�ؽ������t�W�����У�Ŀ�˱����3D��Ϣ��Դ�ǴŹ�������CT������t�W������
�D3 �ڷ�ƽ��������M��3D��ӡ
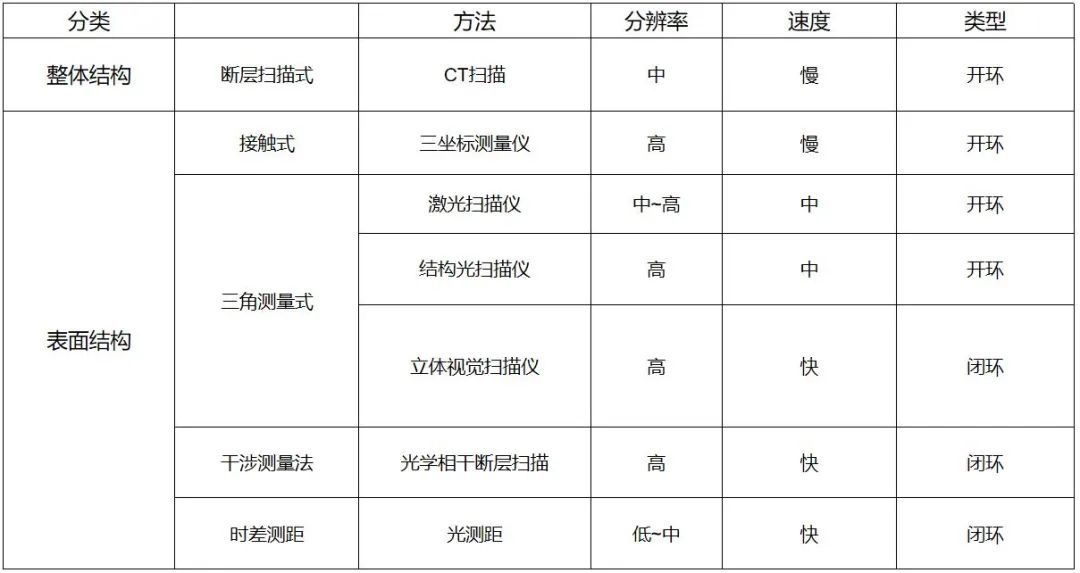
2.2 ����Ŀ�ˎνY�����Π��
ͨ�^�\���Π�̿�ʹ��������ܵIJ������ض��̼��£��ضȡ��x�ӝ�ȡ��Cеؓ�d�����FҎ�����Π�׃��������Ŀ�ˎνY�����Π�̳����ڿɴ����t��ֲ��������죬�����ֱ��3D��ӡ�����w�ϣ����M���R���\����M�Ђ����ޏ͡�
�D4 ���ڵĴ�ӡ�Y���νY�����Π��
3. �]�h�˹�����3D��ӡ
�]�hAI��ӡ��ָ���r�m����ӡ�h��׃����3D��ӡ����������ڙz�y����ۙ���R�e�㷨�������ڴ�ӡ�^���Ќ��r�����\�Ӡ�B����ӡ�ӵı���Y���ʹ�ӡ�^�ĔD����B���]�h�˹�����3D��ӡ��Ҫ�Ɍ��F�ɴ��ܣ�ͨ�^�ھ�У����ߴ�ӡ�|����ͨ�^�ھ���ۙ���F�Ƅ�Ŀ���ϵ�ԭλ��ӡ��
3.1 ��ߴ�ӡ�|��
���]�h3D��ӡ�У����N������ͨ�^�c3D��ӡƽ�_�M�м��ɣ��܉��^����Ϻʹ�ӡ�Y���Ġ�B�����Д�����������Ӌ��Cҕ�X�͙C���W���㷨��Ӌ�㹤���У��M���R�e��ӡȱ�ݣ���������M�o���\�ӿ���ϵ�y�ṩ�������Լm����ӡ�г��F���e�`��
�D5 �����]�hAIУ�����F��ӡ�|��������λ���Ƅ�Ŀ���ϵ�3D��ӡ
3.2 ���Ƅ�Ŀ�����M��3D��ӡ
���w�е�Ƥ�w��ܛ���ٶ����S�r�g��׃�����l������׃�Q�ͷDŽ���׃�Σ���������������Ҫ���F���@Щ�ӑB׃���Y���ϵ�ԭλ��ӡ����Ҫ���r�����Д������{����ӡ·����
3.3 �C���˸�֪���g�o��ԭλ3D��ӡ
���ÙC���˸�֪���gĿ���Ǟ����R�e���ٽM���Ďκ͙Cе���ԣ��Լ��ӑBϵ�y�еĸɔ_�Ͳ��_���ԡ��ͼ���֪��������ҕ�X��֪�������ó���ϵ�y�͈D��̎���㷨��z�yҕ�X���������M��3D�ؽ�������֪����ڴ��X����ϵ�y��֪�X����3D��ӡ������ͼ���֪�ؘ���3D�����������ں��m����·��Ҏ����
�D6 ����ԭλ3D��ӡ�ęC���˸�֪���g
4. �A�y���˹������o��3D��ӡ
�ڻ��w�������M��3D��ӡ��������Ҫ�ܵ����С����ƺ�Ӌ�����t�����ơ���ӡ�^����Ҫ���M�������׃������푑�����t���ܕ�������е��ײ���M�����Ķ�Ӱ푴�ӡ�|�����p���M�����@��Ҫ�A�y���˹��������˽⮔ǰ��B��ͬ�r��߀���Ը����^ȥ�Ľ���A�yδ����B���A�y�܇��M����δ��׃�β�Ҏ��δ�����������Ч�p�ٻ�������ӡ�e�`��
5. ���g�C���ˌ��Fԭλ3D��ӡ
���t�W�I�����g�C����ԭλ3D��ӡ�Ɍ���������늡����W�����﹦�ܵ��������ֱ��ݔ�͵����w֮�У��Ķ��Զ�N��ʽ�o���F���t�W�ί����@Щ�������M���к;��_�\�ӿ������������g�C���˿��Ԍ��F�������ܡ������g���Ԝp�����t���e�`��ɵ������������
�D7 ʹ�����g�C�����M��3D��ӡ
�����˹������o�����켼�g�M�е�3D��ӡ�ڿɴ����O���ֲ��������췽����о�ĝ���������AI���g������3D��ӡ֮����̎�����A�Σ�Ŀǰ��Ȼȱ��3D��ӡ�C���˺��Ñ�֮�g�����ܽ������档չ��δ���������F����̓�M�F���ȼ��g��3D��ӡ�ĽY�ό���ʹ�˹����܌��Fȫ�̵Ĵ�ӡָ���������˹������M���o������Ҳ���ɞ��~��3D��ӡ�ռ�������Ҫ;����
�����īI
Zhu, Z., Ng, D.W.H., Park, H.S. et al. 3D-printed multifunctional materials enabled by artificial-intelligence-assisted fabrication technologies. Nat Rev Mater 6, 27�C47 (2021)
https://doi.org/10.1038/s41578-020-00235-2
(؟�ξ���admin)

��һƪ��̼���E�p90%��BMW���RM���Α{��3D��ӡ���g�s�@�ɳ��m�lչ��
��һƪ������������3D��ӡ����g ����ǿ�ֲ���������W�����о�
��һƪ������������3D��ӡ����g ����ǿ�ֲ���������W�����о�
 Fabric8Labs�Ƴ�AIоƬ��
Fabric8Labs�Ƴ�AIоƬ�� Titomic��һ���������cnuF
Titomic��һ���������cnuF ���m��˾���_�O3D��ӡ����
���m��˾���_�O3D��ӡ���� Chicago Additive�Ƴ�AMOS
Chicago Additive�Ƴ�AMOS 590MHz����+��90%ݗ��Ч��
590MHz����+��90%ݗ��Ч�� ��˹���Ǵ�W�����d��У��
��˹���Ǵ�W�����d��У��������
- ��Fabric8Labs�Ƴ�AIоƬ������壺3D��
- ��Titomic��һ���������cnuForj ��������
- �����m��˾���_�O3D��ӡ�������칤�S����
- ��Chicago Additive�Ƴ�AMOS 300��܊��FD
- ��590MHz����+��90%ݗ��Ч�ʣ���������Ժ
- ����˹���Ǵ�W�����d��У���̎����� 3D
- ��Nature�ӿ���������ȌW�����gͨ�^��Ƭ
- ��Axtra3D�Ƴ�����HPS��ˇ�ļ����z3D��ӡ
- �����о��l�Fͨ�^3D��ӡ�������ĺ�ȃ���
- ��Fabric8Labs�cAEWIN������������늻��W
 ͻ��������3D��ӡ
ͻ��������3D��ӡ �ϰ�LEAP 71��˾
�ϰ�LEAP 71��˾ 3D�����ӡ������
3D�����ӡ������ ��Small Science
��Small Science ��������-�����
��������-����� ���A��W��������
���A��W�����������c����
- ���������ӌW����ܵ���������TC4��ˇ��
- ���p���Ӿۺϡ��߾��������I��ġ����ǡ�
- ��3D��ӡ����Y���OӋ�K�Oָ�ϣ������p��
- ���C���������·���3D��ӡ���g
- ���B�m�����̼��g����ͻ�ƣ�Carbon����
- ��3D�����ӡ���g����������ٹ����е���
- ���u݆�~Ƭ�����������������ޏͼ��g����
- ���Gɫ�ְ�ȫ��3D��ӡ�zԭˮ���z���IJ���
- ��3D��ӡ�C���g���ƴ��FDM��SLA��CLIP��
- ��⁏��ˣ��K����3D��ӡ⁺Ͻ��q朣��b��


