�о��ˆT���á�FDM�D�����㡱�_�l3D��ӡ�����C���ˣ���Ч������
�r�g��2025-02-19 11:08 ��Դ��δ֪ ���ߣ�admin ��x����
2025��2��18�գ����ش�W(UT) ���ϵ�����W(SDU)���о��ˆT�����һ������ķ������ӏ���ϙC������ܛ���Ϻ̈́��Բ���֮�g��ϵ���@�ǙC���˼��g�I���һ�����m������Ȥ���ǣ������ķ������ճ�FDM��ӡ�^���г�������“�D������”���}�D���郞�ݡ�ͨ�^������ӡ�C������Y���������ҵ���һ�N��߲����gճ���Եķ��������⣬�@�N�����m���ژ˜����ڳ��e���� (FDM) ��ӡ�C����˱���Ҫ���F�Ķ���ϴ�ӡ�C�ĬF�н�Q����������ʹ�á�
��������ϊA�Qģ�����ָ�ף������c�DŽ���ָ�װ�ճ���ڶ�W�ϣ�������ָ�ͼ״�֮�g����Ȼճ�ϡ��DƬ���� UT
���P�о����}�� “Bio-inspired 3D printing approachfor bonding soft and rigid materials through underextrusion”��Փ�İl���ڡ���Ȼ���s־�ϣ����߰������_������W���о��ˆT Arman Goshtasbi���¿��_˹��W�� Luca Grignaffini �� Ali Sadeghi��
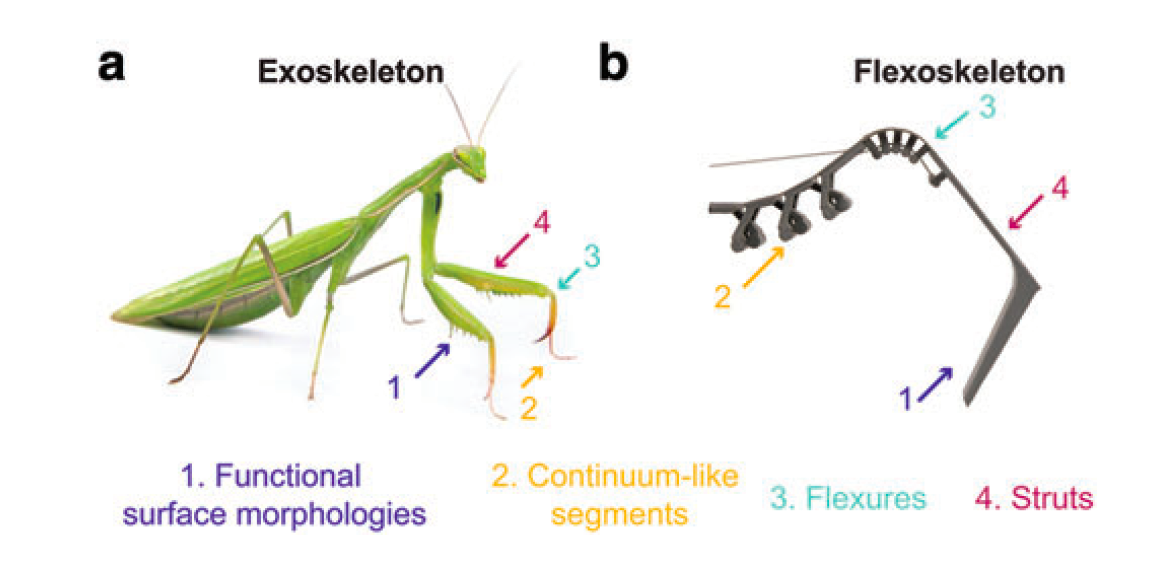
ģ����Ȼ�������C���˼��g
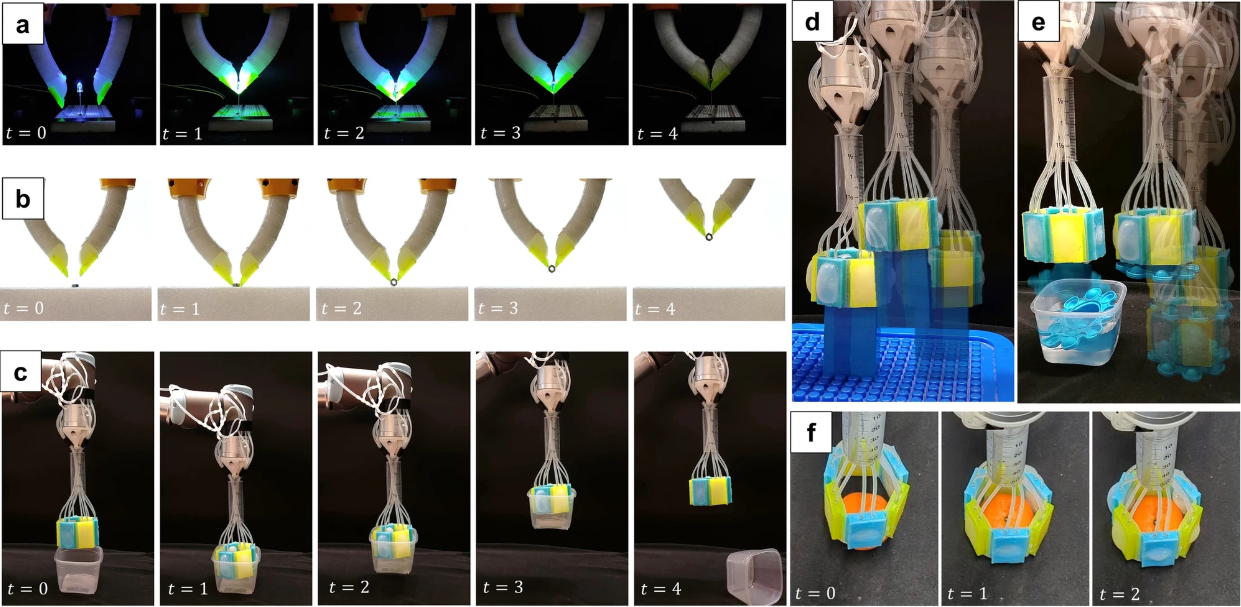
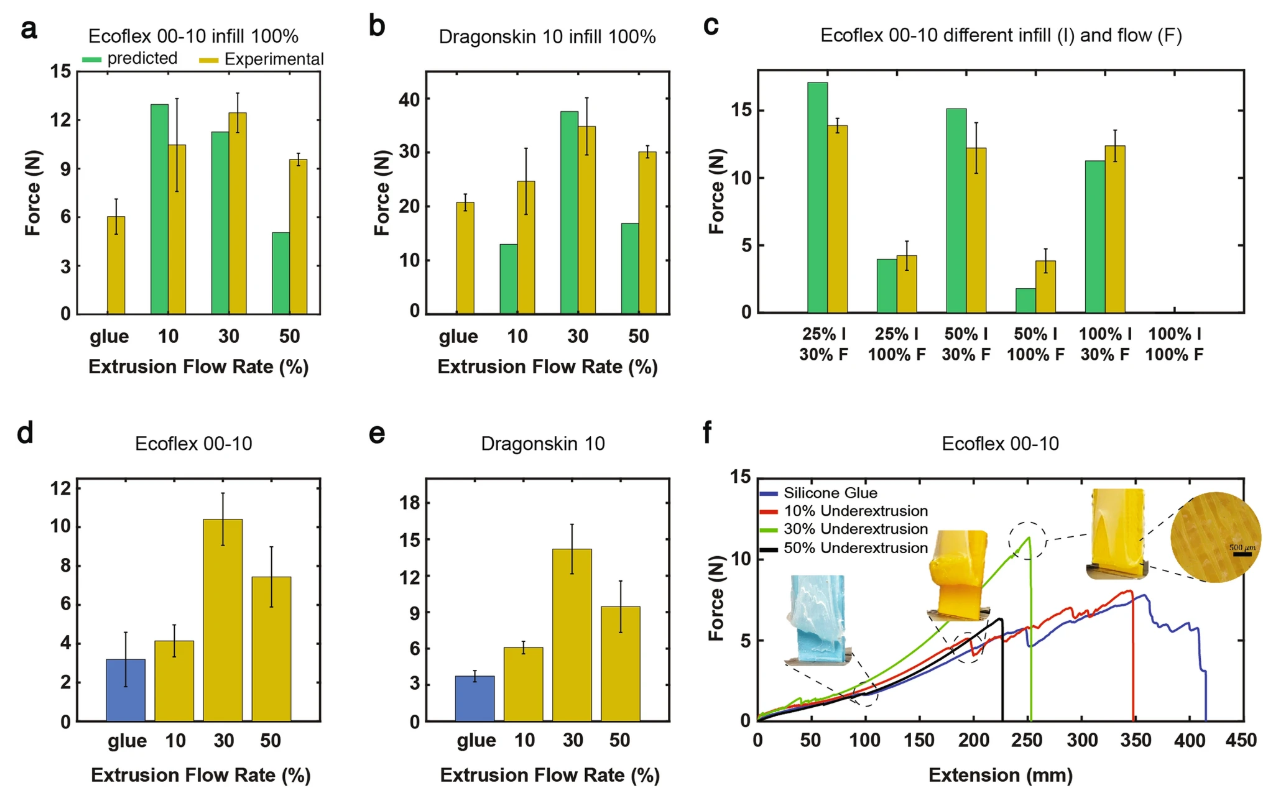
�C�����е�ܛ������Ӳ�������Ѓ��ݣ�������������_ճ��һֱ��һ�����ֵ����顣�@Щ����̎�푪���ķ�ʽ��ͬ���@����������ճ�����^���������y��ճ�Ϸ�������ճ�τ����ڙCе��׃���ɞ�ʧЧ�c��Ȼ��������Ȼ�ṩ��һ�N��Q��������������Y���M���o�p�B�Ӽ������һ�ӣ��о��ˆT�_�l����һ�N�w�S���Y�������Լӏ�ܛ�|��Ӳ�|����֮�g���B�ӡ��@�N������ӳ�˼��졢�g����������Ȼ������η��䉺�����Ķ���ֹͻȻ�ęCе���ϡ�ͨ�^����Ĝyԇ�������{�ˌ��F���Ⱥ��`�������ƽ������Ŀ�϶�ʣ���־�������C���˼��g��ǰ�~�M��һ���������f����һ�С��ڴ�Ӽ��к̈́��x�yԇ�У��@�N�����Ȃ��yճ�τ������ܸ߳� 200%��ʹ�� Ecoflex 00-10 �� DragonSkin 10 �����z�M�еČ��������c����ճ�τ���ȣ�ճ�������@������ʹܛ�C���˾��и��õ������ԡ�
���ښ��ܛ�C���˶��ԣ������ܷ����P��Ҫ��ԓ����Ҳ�@ʾ�������õ�Ч������ģ�M�����l���£�ʹ��ԓ���g�γɵ�ճ������ʹ��ճ�τ�ճ�ϵ�ճ�����߳����������������ڳ��ͻ�ϙC����ϵ�y�еĝ�����ͨ�^�ṩһ�N���Ρ��ͳɱ��ķ�ʽ���ڲ�ͬ����֮�g�����ι̵ĽY�ϣ��@�N�������Ը�׃��ϙC���˵����췽ʽ�����ÿ��ԔUչ���κΙCе�ɿ������P��Ҫ�ĭh������ܛ�C�����_���µĿ����ԡ����о��ˆT�Q��δ���Ĺ������ܕ�̽��ͨ�^ģ����Ȼ��ܛӲ����֮�g����u�^�Ɂ��Mһ�������@헼��g�ķ�����ʹ�� ABS �� PETG ����� 3D ��ӡ�����M�МyԇҲ���Խ�ʾʹճ���������ķ�����
����Ӽ��к̈́��xԇ�Y�����DƬ���� UT
�����C�����о�
�^ȥ��3D ��ӡ�ў��N���صķ����C���˵��_�l������ؕ�I�����ݴ�Wʥ�����У���о��ˆT������һ��@��ؕ�I��������B��һ�N��������3D ��ӡܛ�w���x�C���˵ķ��������������ԹǼܴ�ӡ�������c�˜� FDM ��ӡ�C���ʹ�ã������Լ��z�ӯB�ڼӟ�ğ����Ի����ϡ�
���Թ������켼�g�`�Ё������x���⚤���DƬ���� Soft Robotics
�@�N�������������a���o�谺�F�Ķ���� 3D ��ӡ��ʹܛ�C���˸������F��ԓ���g�����x������м�ȡ�`�У�ƽ�����`���ԺͽY��֧�Ρ��ڜyԇ�У���ӡ�ęC���˱��F���˸��õď��Ⱥ������ԣ�ԭ�ͳɹ��������ߡ�2022 �꣬�_���W��һ���W���_�l��һ��3D ��ӡ�C���~�����ڏ�ˮ�����ռ����ϡ��@������ Gillbert �ęC�����ɰ����Z·������ʲ�� 2022 ��l���������w��Y���ͼ��W���ɲ��@С���ɺ��������w����ͬ�r���Sˮͨ�^���@���OӋ�A����2022 ����Ȼ�C���˴�ِ�����ڌ���ҭh����Ӣ�������гɹ��M���˜yԇ�����r�������h�̿��Ƶģ�δ��Ӌ�������������Ӿ�ٶȺ������ԡ�
(؟�ξ���admin)

 Fabric8Labs�Ƴ�AIоƬ��
Fabric8Labs�Ƴ�AIоƬ�� Titomic��һ���������cnuF
Titomic��һ���������cnuF ���m��˾���_�O3D��ӡ����
���m��˾���_�O3D��ӡ���� Chicago Additive�Ƴ�AMOS
Chicago Additive�Ƴ�AMOS 590MHz����+��90%ݗ��Ч��
590MHz����+��90%ݗ��Ч�� ��˹���Ǵ�W�����d��У��
��˹���Ǵ�W�����d��У��������
- ��Fabric8Labs�Ƴ�AIоƬ������壺3D��
- ��Titomic��һ���������cnuForj ��������
- �����m��˾���_�O3D��ӡ�������칤�S����
- ��Chicago Additive�Ƴ�AMOS 300��܊��FD
- ��590MHz����+��90%ݗ��Ч�ʣ���������Ժ
- ����˹���Ǵ�W�����d��У���̎����� 3D
- ��Nature�ӿ���������ȌW�����gͨ�^��Ƭ
- ��Axtra3D�Ƴ�����HPS��ˇ�ļ����z3D��ӡ
- �����о��l�Fͨ�^3D��ӡ�������ĺ�ȃ���
- ��Fabric8Labs�cAEWIN������������늻��W
 ͻ��������3D��ӡ
ͻ��������3D��ӡ �ϰ�LEAP 71��˾
�ϰ�LEAP 71��˾ 3D�����ӡ������
3D�����ӡ������ ��Small Science
��Small Science ��������-�����
��������-����� ���A��W��������
���A��W�����������c����
- ���������ӌW����ܵ���������TC4��ˇ��
- ���p���Ӿۺϡ��߾��������I��ġ����ǡ�
- ��3D��ӡ����Y���OӋ�K�Oָ�ϣ������p��
- ���C���������·���3D��ӡ���g
- ���B�m�����̼��g����ͻ�ƣ�Carbon����
- ��3D�����ӡ���g����������ٹ����е���
- ���u݆�~Ƭ�����������������ޏͼ��g����
- ���Gɫ�ְ�ȫ��3D��ӡ�zԭˮ���z���IJ���
- ��3D��ӡ�C���g���ƴ��FDM��SLA��CLIP��
- ��⁏��ˣ��K����3D��ӡ⁺Ͻ��q朣��b��


